
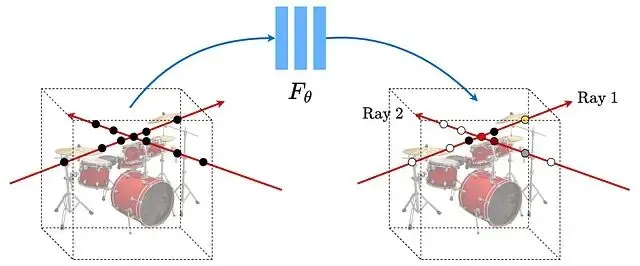
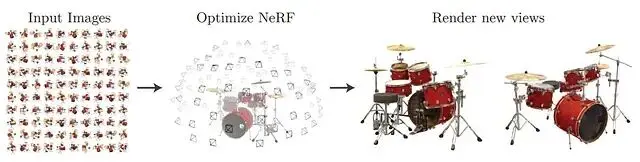
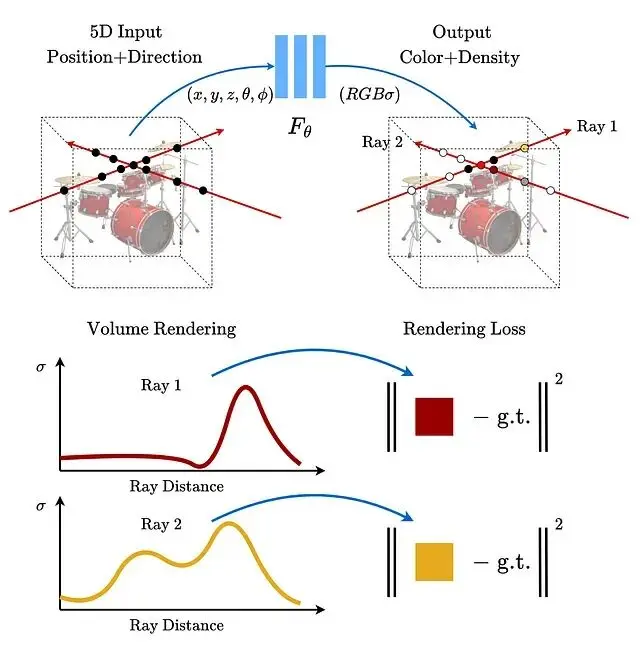
NeRF(Neural Radiance Fields,神經輻射場)的核心思路是用一個全連接網絡表示三維場景。輸入是5D向量空間座標(x, y, z)加上視角方向(θ, φ),輸出則是該點的顏色和體積密度。訓練的數據則是同一物體從不同角度拍攝的若干張照片。
通常情況下泛化能力是模型的追求目標,需要在大量不同樣本上訓練以避免過擬合。但NeRF恰恰相反,它只在單一場景的多個視角上訓練,刻意讓網絡"過擬合"到這個特定場景,這與傳統神經網絡的訓練邏輯完全相反。
這樣NeRF把網絡訓練成了某個場景的"專家",這個專家只懂一件事,但懂得很透徹:給它任意一個新視角,它都能告訴你從那個方向看場景是什麼樣子,存儲的不再是一堆圖片,而是場景本身的隱式表示。

基本概念
把5D輸入向量拆開來看:空間位置(x, y, z)和觀察方向(θ, φ)。
顏色(也就是輻射度)同時依賴位置和觀察方向,這很好理解,因為同一個點從不同角度看可能有不同的反光效果。但密度只跟位置有關與觀察方向無關。這裏的假設是材質本身不會因為你換個角度看就變透明或變不透明,這個約束大幅降低了模型複雜度。
用來表示這個映射關係的是一個多層感知機(MLP)而且沒有卷積層,這個MLP被有意過擬合到特定場景。
渲染流程分三步:沿每條光線採樣生成3D點,用網絡預測每個點的顏色和密度,最後用體積渲染把這些顏色累積成二維圖像。
訓練時用梯度下降最小化渲染圖像與真實圖像之間的差距。不過直接訓練效果不好原始5D輸入需要經過位置編碼轉換才能讓網絡更好地捕捉高頻細節。
傳統體素表示需要顯式存儲整個場景佔用空間巨大。NeRF則把場景信息壓縮在網絡參數裏,最終模型可以比原始圖片集小很多。這是NeRF的一個關鍵優勢。
相關工作
NeRF出現之前,神經場景表示一直比不過體素、三角網格這些離散表示方法。
早期也有人用網絡把位置座標映射到距離函數或佔用場,但只能處理ShapeNet這類合成3D數據。

arxiv:1912.07372 用3D佔用場做隱式表示提出了可微渲染公式。arxiv:1906.01618的方法在每個3D點輸出特徵向量和顏色用循環神經網絡沿光線移動來檢測表面,但這些方法生成的表面往往過於平滑。
如果視角採樣足夠密集,光場插值技術就能生成新視角。但視角稀疏時必須用表示方法,體積方法能生成真實感強的圖像但分辨率上不去。
場景表示機制
輸入是位置 x = (x, y, z) 和觀察方向 d = (θ, φ),輸出是顏色 c = (r, g, b) 和密度 σ。整個5D映射用MLP來近似。

優化目標是網絡權重 Θ。密度被假設為多視角一致的,顏色則同時取決於位置和觀察方向。
網絡結構上先用8個全連接層處理空間位置,輸出密度σ和一個256維特徵向量。這個特徵再和觀察方向拼接,再經過一個全連接層得到顏色。
體積渲染
光線參數化如下:
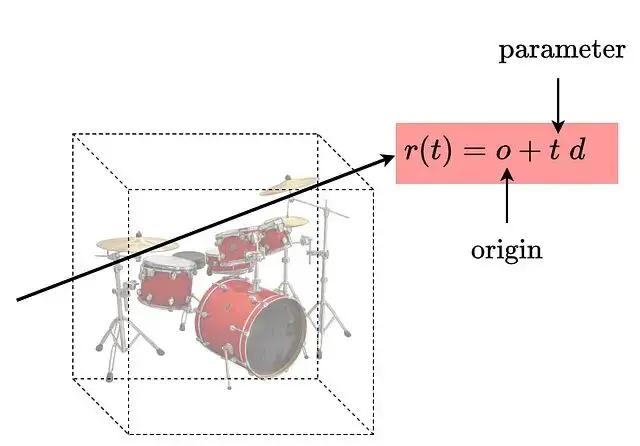
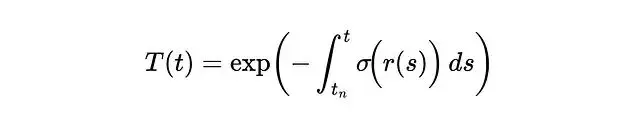
密度σ描述的是某點對光線的阻擋程度,可以理解為吸收概率。更嚴格地説它是光線在該點終止的微分概率。根據這個定義,光線從t傳播到tₙ的透射概率可以表示為:
σ和T之間的關係可以畫圖來理解:
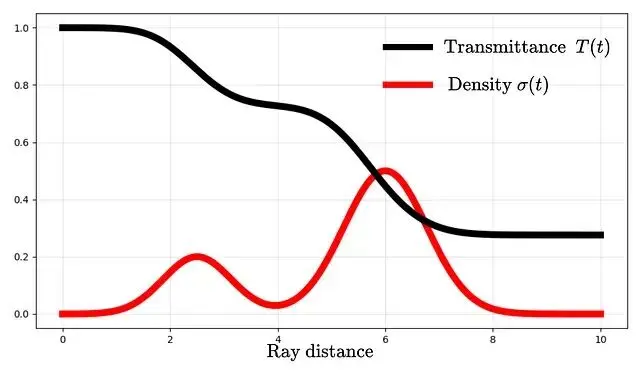
密度升高時透射率下降。一旦透射率降到零,後面的東西就完全被遮住了,也就是看不見了。
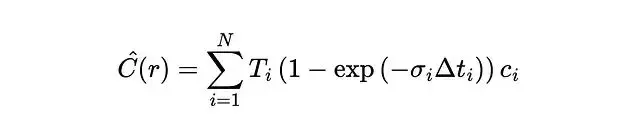
光線的期望顏色C(r)定義如下,沿光線從近到遠積分:
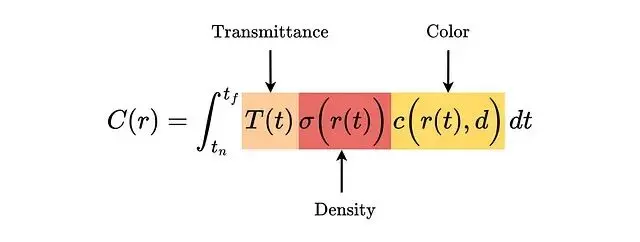
問題在於c和σ都來自神經網絡這個積分沒有解析解。
實際計算時用數值積分,採用分層採樣策略——把積分範圍分成N個區間,每個區間均勻隨機抽一個點。

分層採樣保證MLP在整個優化過程中都能在連續位置上被評估。採樣點通過求積公式計算C(t)這個公式選擇上考慮了可微性。跟純隨機採樣比方差更低。
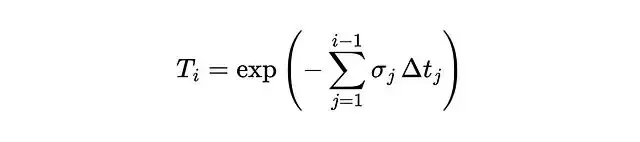
Tᵢ是光線存活到第i個區間之前的概率。那光線在第i個區間內終止的概率呢?可以用密度來算:

σ越大這個概率越趨近於零,再往下推導:
光線顏色可以寫成:
其中:
位置編碼
直接拿5D座標訓練MLP,高頻細節渲染不出來。因為深度網絡天生偏好學習低頻信號,解決辦法是用高頻函數把輸入映射到更高維空間。

γ對每個座標分別應用,是個確定性函數沒有可學習參數。p歸一化到[-1,+1]。L=4時的編碼可視化:
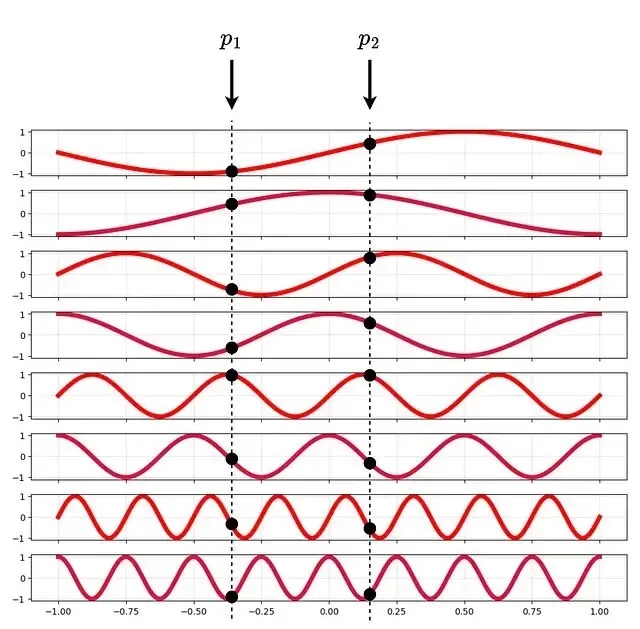
L=4時的位置編碼示意
編碼用的是不同頻率的正弦函數。Transformer裏也用類似的位置編碼但目的不同——Transformer是為了讓模型感知token順序,NeRF是為了注入高頻信息。
分層採樣
均勻採樣的問題在於大量計算浪費在空曠區域。分層採樣的思路是訓練兩個網絡,一個粗糙一個精細。
先用粗糙網絡採樣評估一批點,再根據結果用逆變換採樣在重要區域加密採樣。精細網絡用兩組樣本一起計算最終顏色。粗糙網絡的顏色可以寫成採樣顏色的加權和。
實現
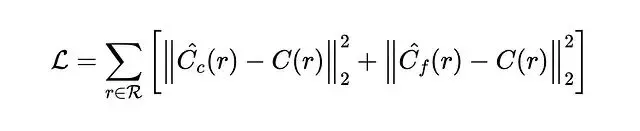
每個場景單獨訓練一個網絡,只需要RGB圖像作為訓練數據。每次迭代從所有像素裏採樣一批光線,損失函數是粗糙和精細網絡預測值與真值之間的均方誤差。
接下來從零實現NeRF架構,在一個包含藍色立方體和紅色球體的簡單數據集上訓練。
數據集生成代碼不在本文範圍內——只涉及基礎幾何變換沒有NeRF特有的概念。
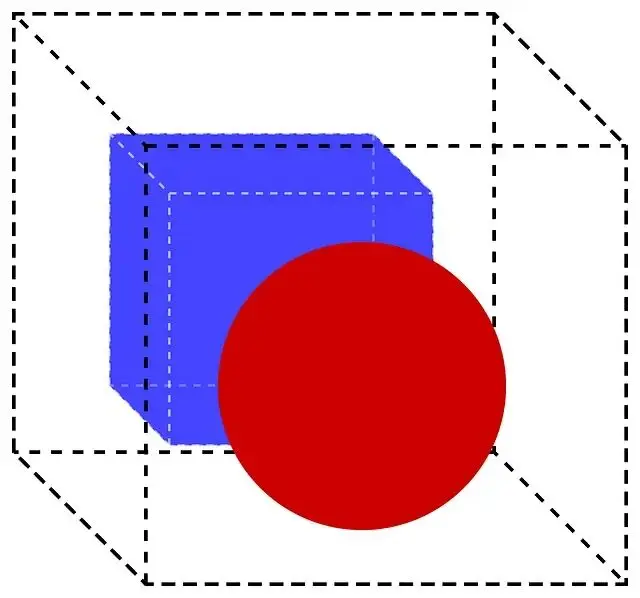
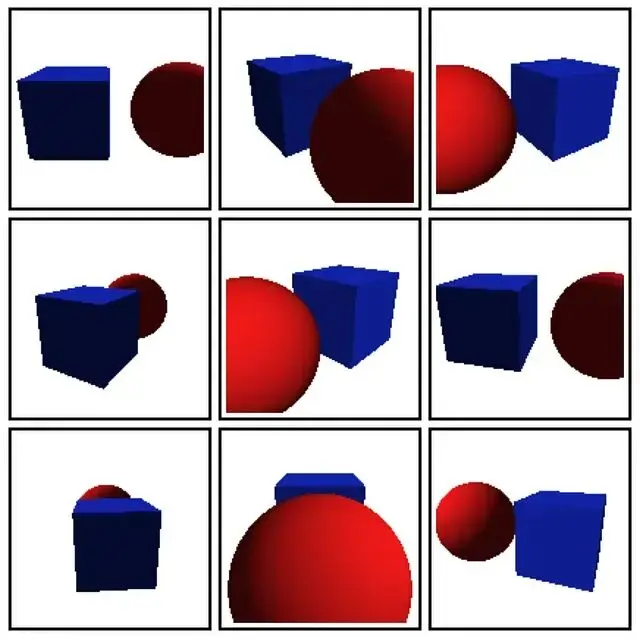
數據集裏的一些渲染圖像。相機矩陣和座標也存在了JSON文件裏。
先導入必要的庫:
import os, json, math
import numpy as np
from PIL import Image
import torch
import torch.nn as nn
import torch.nn.functional as F位置編碼函數:
def positional_encoding(x, L):
freqs = (2.0 ** torch.arange(L, device=x.device)) * math.pi # Define the frequencies
xb = x[..., None, :] * freqs[:, None] # Multiply by the frequencies
xb = xb.reshape(*x.shape[:-1], L * 3) # Flatten the (x,y,z) coordinates
return torch.cat([torch.sin(xb), torch.cos(xb)], dim=-1)根據相機參數生成光線:
def get_rays(H, W, camera_angle_x, c2w, device):
# assume the pinhole camera model
fx = 0.5 * W / math.tan(0.5 * camera_angle_x) # calculate the focal lengths (assume fx=fy)
# principal point of the camera or the optical center of the image.
cx = (W - 1) * 0.5
cy = (H - 1) * 0.5
i, j = torch.meshgrid(torch.arange(W, device=device),
torch.arange(H, device=device), indexing="xy")
i, j = i.float(), j.float()
# convert pixels to normalized camera-plane coordinates
x = (i - cx) / fx
y = -(j - cy) / fx
z = -torch.ones_like(x)
# pack into 3D directions and normalize
dirs = torch.stack([x, y, z], dim=-1)
dirs = dirs / torch.norm(dirs, dim=-1, keepdim=True)
# rotate rays into world coordinates using pose matrix
R, t = c2w[:3, :3], c2w[:3, 3]
rd = dirs @ R.T
ro = t.expand_as(rd)
return ro, rdNeRF網絡結構:
class NeRF(nn.Module):
def __init__(self, L_pos=10, L_dir=4, hidden=256):
super().__init__()
# original vector is concatented with the fourier features
in_pos = 3 + 2 * L_pos * 3
in_dir = 3 + 2 * L_dir * 3
self.fc1 = nn.Linear(in_pos, hidden)
self.fc2 = nn.Linear(hidden, hidden)
self.fc3 = nn.Linear(hidden, hidden)
self.fc4 = nn.Linear(hidden, hidden)
self.fc5 = nn.Linear(hidden + in_pos, hidden)
self.fc6 = nn.Linear(hidden, hidden)
self.fc7 = nn.Linear(hidden, hidden)
self.fc8 = nn.Linear(hidden, hidden)
self.sigma = nn.Linear(hidden, 1)
self.feat = nn.Linear(hidden, hidden)
self.rgb1 = nn.Linear(hidden + in_dir, 128)
self.rgb2 = nn.Linear(128, 3)
self.L_pos, self.L_dir = L_pos, L_dir
def forward(self, x, d):
x_enc = torch.cat([x, positional_encoding(x, self.L_pos)], dim=-1)
d_enc = torch.cat([d, positional_encoding(d, self.L_dir)], dim=-1)
h = F.relu(self.fc1(x_enc))
h = F.relu(self.fc2(h))
h = F.relu(self.fc3(h))
h = F.relu(self.fc4(h))
h = torch.cat([h, x_enc], dim=-1) # skip connection
h = F.relu(self.fc5(h))
h = F.relu(self.fc6(h))
h = F.relu(self.fc7(h))
h = F.relu(self.fc8(h))
sigma = F.relu(self.sigma(h)) # density is calculated using positional information
feat = self.feat(h)
h = torch.cat([feat, d_enc], dim=-1) # add directional information for color
h = F.relu(self.rgb1(h))
rgb = torch.sigmoid(self.rgb2(h))
return rgb, sigma渲染函數,這個是整個流程的核心:
def render_rays(model, ro, rd, near=2.0, far=6.0, N=64):
# sample along the ray
t = torch.linspace(near, far, N, device=ro.device)
pts = ro[:, None, :] + rd[:, None, :] * t[None, :, None] # r = o + td
# attach view directions to each sample
# each point knows where the ray comes from
dirs = rd[:, None, :].expand_as(pts)
# query NeRF at each point and reshape
rgb, sigma = model(pts.reshape(-1,3), dirs.reshape(-1,3))
rgb = rgb.reshape(ro.shape[0], N, 3)
sigma = sigma.reshape(ro.shape[0], N)
# compute the distance between the samples
delta = t[1:] - t[:-1]
delta = torch.cat([delta, torch.tensor([1e10], device=ro.device)])
# convert density into opacity
alpha = 1 - torch.exp(-sigma * delta)
# compute transmittance along the ray
T = torch.cumprod(torch.cat([torch.ones((ro.shape[0],1), device=ro.device),
1 - alpha + 1e-10], dim=-1), dim=-1)[:, :-1]
weights = T * alpha
return (weights[...,None] * rgb).sum(dim=1) # accumulate the colors訓練循環:
device = "cuda" if torch.cuda.is_available() else "cpu"
images, c2ws, H, W, fov = load_dataset("nerf_synth_cube_sphere")
images, c2ws = images.to(device), c2ws.to(device)
model = NeRF().to(device)
opt = torch.optim.Adam(model.parameters(), lr=5e-4)
loss_hist, psnr_hist, iters = [], [], []
for it in range(1, 5001):
idx = torch.randint(0, images.shape[0], (1,)).item()
ro, rd = get_rays(H, W, fov, c2ws[idx], device)
gt = images[idx].reshape(-1,3)
sel = torch.randint(0, ro.numel()//3, (2048,), device=device)
pred = render_rays(model, ro.reshape(-1,3)[sel], rd.reshape(-1,3)[sel])
# for simplicity, we will only implement the coarse sampling.
loss = F.mse_loss(pred, gt[sel])
opt.zero_grad()
loss.backward()
opt.step()
if it % 200 == 0:
psnr = -10 * torch.log10(loss).item()
loss_hist.append(loss.item())
psnr_hist.append(psnr)
iters.append(it)
print(f"Iter {it} | Loss {loss.item():.6f} | PSNR {psnr:.2f} dB")
torch.save(model.state_dict(), "nerf_cube_sphere_coarse.pth")
# ---- Plots ----
plt.figure()
plt.plot(iters, loss_hist, color='red', lw=5)
plt.title("Training Loss")
plt.show()
plt.figure()
plt.plot(iters, psnr_hist, color='black', lw=5)
plt.title("Training PSNR")
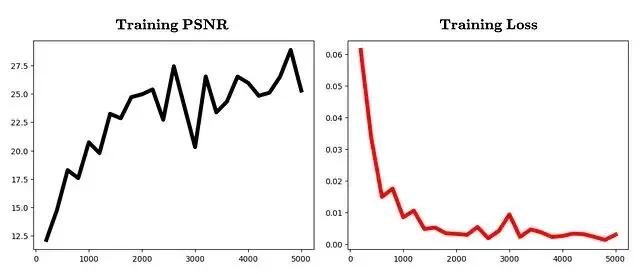
plt.show()迭代次數與PSNR、損失值的變化曲線:
模型訓練完成下一步是生成新視角。
look_at函數用於從指定相機位置構建位姿矩陣:
def look_at(eye):
eye = torch.tensor(eye, dtype=torch.float32) # where the camera is
target = torch.tensor([0.0, 0.0, 0.0])
up = torch.tensor([0,1,0], dtype=torch.float32) # which direction is "up" in the world
f = (target - eye); f /= torch.norm(f) # forward direction of the camera
r = torch.cross(f, up); r /= torch.norm(r) # right direction. use cross product between f and up
u = torch.cross(r, f) # true camera up direction
c2w = torch.eye(4)
c2w[:3,0], c2w[:3,1], c2w[:3,2], c2w[:3,3] = r, u, -f, eye
return c2w推理代碼:
device = "cuda" if torch.cuda.is_available() else "cpu"
with open("nerf_synth_cube_sphere/transforms.json") as f:
meta = json.load(f)
H, W, fov = meta["h"], meta["w"], meta["camera_angle_x"]
model = NeRF().to(device)
model.load_state_dict(torch.load("nerf_cube_sphere_coarse.pth", map_location=device))
model.eval()
os.makedirs("novel_views", exist_ok=True)
for i in range(120):
angle = 2 * math.pi * i / 120
eye = [4 * math.cos(angle), 1.0, 4 * math.sin(angle)]
c2w = look_at(eye).to(device)
with torch.no_grad():
ro, rd = get_rays(H, W, fov, c2w, device)
rgb = render_rays(model, ro.reshape(-1,3), rd.reshape(-1,3))
img = rgb.reshape(H, W, 3).clamp(0,1).cpu().numpy()
Image.fromarray((img*255).astype(np.uint8)).save(f"novel_views/view_{i:03d}.png")
print("Rendered view", i)新視角渲染結果(訓練集中沒有這些角度):
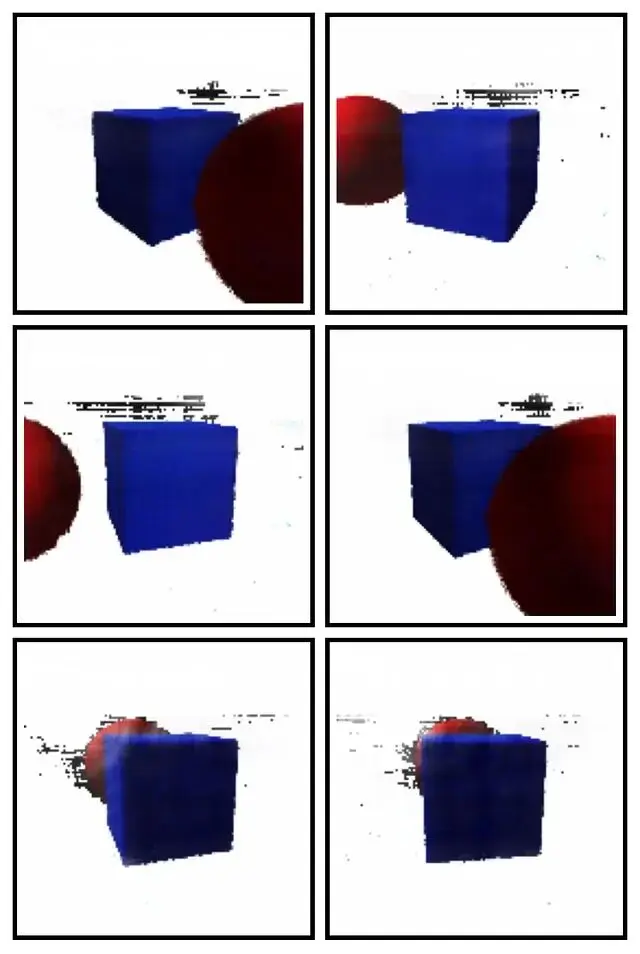
圖中的偽影——椒鹽噪聲、條紋、浮動的亮點——來自空曠區域的密度估計誤差。只用粗糙模型、不做精細採樣的情況下這些問題會更明顯。另外場景裏大片空白區域也是個麻煩,模型不得不花大量計算去探索這些沒什麼內容的地方。
再看看深度圖:
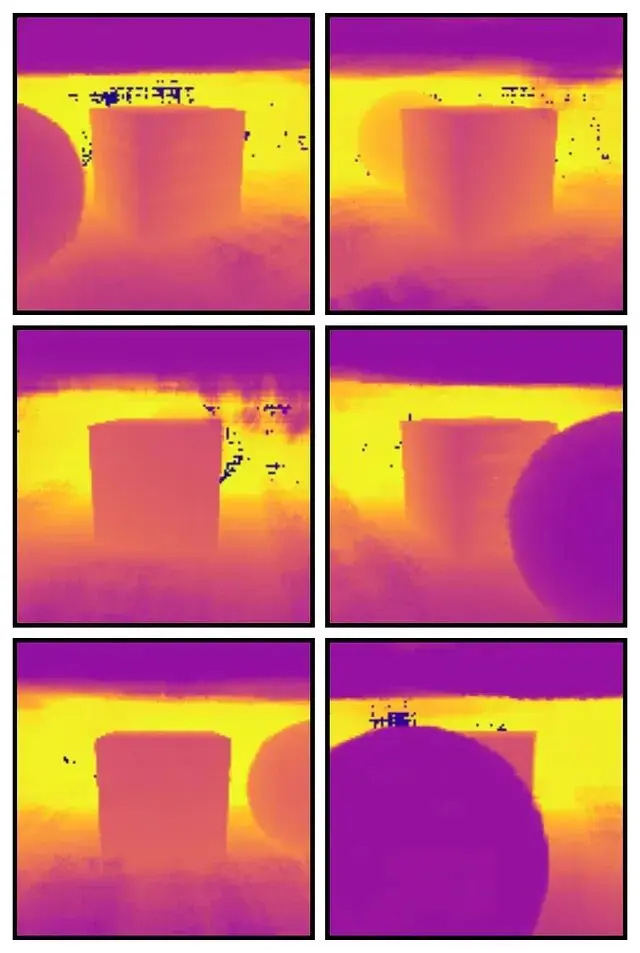
立方體的平面捕捉得相當準確沒有幽靈表面。空曠區域有些斑點噪聲説明雖然空白區域整體學得還行,但稀疏性還是帶來了一些小誤差。
參考文獻
Mildenhall, B., Srinivasan, P. P., Gharbi, M., Tancik, M., Barron, J. T., Simonyan, K., Abbeel, P., & Malik, J. (2020). NeRF: Representing scenes as neural radiance fields for view synthesis.
https://avoid.overfit.cn/post/4a1b21ea7d754b81b875928c95a45856
作者:Kavishka Abeywardana