
Transformer的"二次方注意力瓶頸"的問題是老生常談了。這個瓶頸到底卡在哪實際工程裏怎麼繞過去?本文從一個具體問題出發,介紹Mosaic這套多軸注意力分片方案的設計思路。
注意力的內存困境
注意力機制的計算公式:
Attention(Q, K, V) = softmax(QKᵀ / √d) × V問題出在 QKᵀ 這個矩陣上,它的形狀是
(序列長度 × 序列長度)。
拿150,000個token的序列算一下:
Memory = 150,000² × 4 bytes = 90 billion bytes ≈ 84 GB這只是注意力權重本身的開銷,而且還是單層、單頭。A100的顯存上限是80GB,放不下就是放不下。
現有方案的侷限
FlashAttention 它通過分塊計算,不需要把完整的注意力矩陣實例化出來,內存複雜度從O(n²)降到O(n)。單卡場景下效果很好,但問題是整個序列還是得塞進同一張GPU。
Ring Attention 換了個思路:把序列切片分到多張GPU上,每張卡持有一部分Q,K和V在GPU之間像傳令牌一樣輪轉,一維序列處理起來是很不錯的。
但是多維怎麼辦?
比如處理表格數據的Transformer,輸入張量形狀是
(batch, rows, features, embed)。模型需要在不同維度上做注意力:features維度只有5個token,rows維度卻有150,000個。前者單卡輕鬆搞定,後者則必須分片。
現有的庫都沒法乾淨地處理這種多軸場景。手寫的話,每個軸要單獨寫分片邏輯,進程組管理、張量reshape全得自己來。代碼會變得很髒。
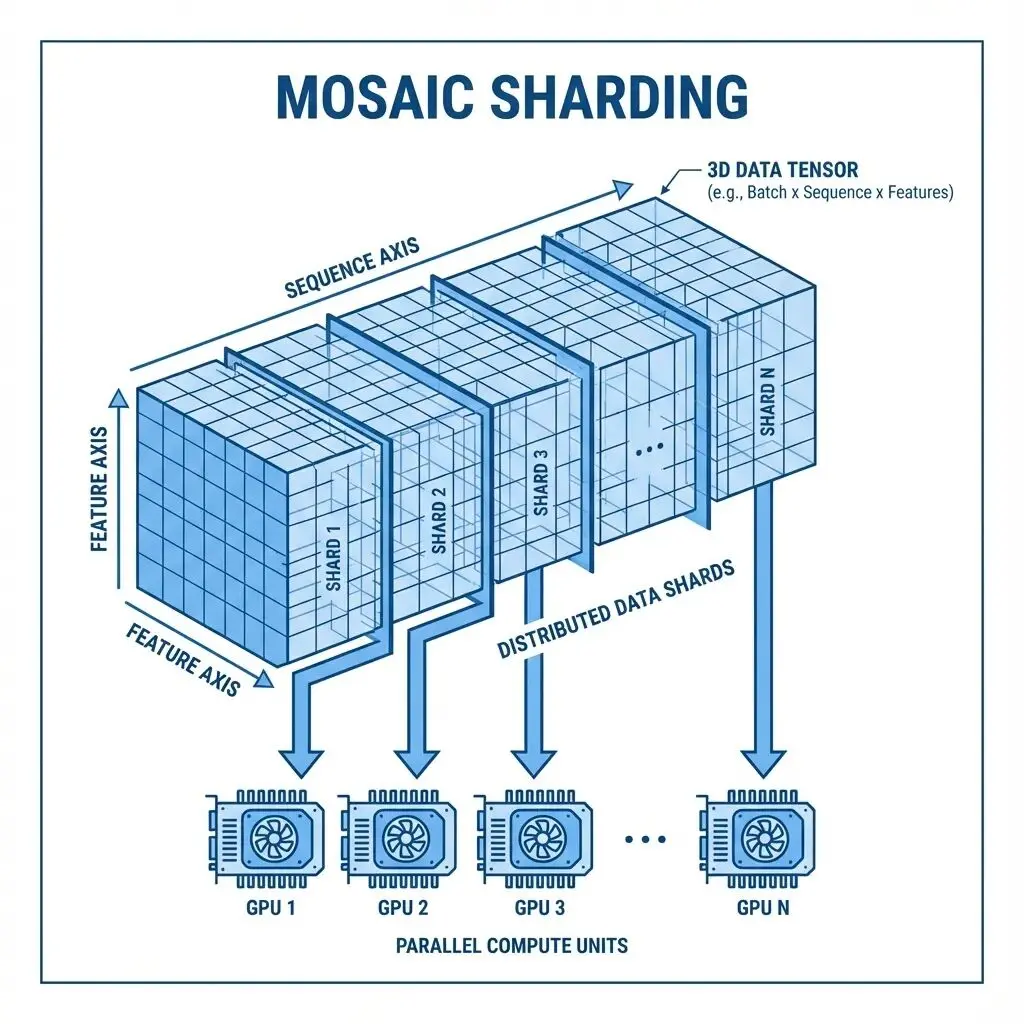
Mosaic的設計
Mosaic本質上是個協調層,負責把不同的注意力軸路由到合適的計算後端:
import mosaic
# Small axis: run locally
feature_attn = mosaic.MultiAxisAttention(
embed_dim=96,
num_heads=4,
attention_axis=2, # features dimension
backend="local" # no communication needed
)
# Large axis: shard across GPUs
row_attn = mosaic.MultiAxisAttention(
embed_dim=96,
num_heads=4,
attention_axis=1, # rows dimension
backend="ring" # ring attention across GPUs
)底層Mosaic會自動處理軸的置換、QKV投影前的reshape、後端分發、以及計算完成後張量形狀的還原。模型代碼保持清晰,分佈式的複雜性被封裝掉了。
Ring Attention的工作機制
核心思想其實很直接:不需要同時持有全部的K和V。可以分批計算注意力分數,逐步累積,最後再做歸一化。
比如説4張GPU的情況下流程是這樣的:
Initial state:
GPU 0: Q₀, K₀, V₀
GPU 1: Q₁, K₁, V₁
GPU 2: Q₂, K₂, V₂
GPU 3: Q₃, K₃, V₃
Step 1: Each GPU computes attention with its local K, V
GPU 0: score₀₀ = Q₀ @ K₀ᵀ
...
Step 2: Pass K, V to the next GPU in the ring
GPU 0 receives K₃, V₃ from GPU 3
GPU 0 sends K₀, V₀ to GPU 1
Step 3: Compute attention with received K, V
GPU 0: score₀₃ = Q₀ @ K₃ᵀ
Accumulate with score₀₀
Repeat for all chunks...
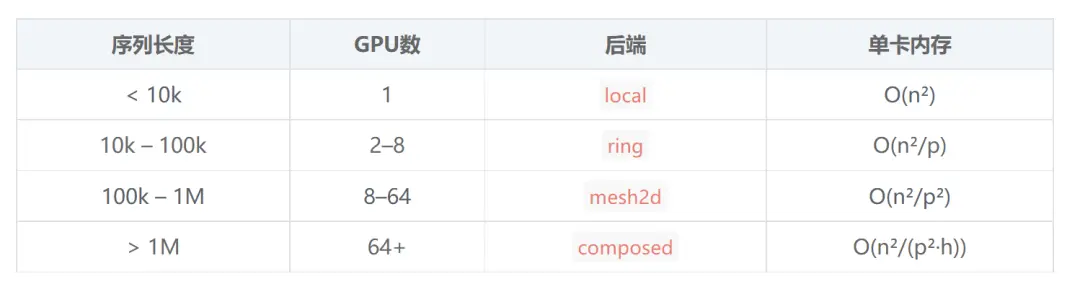
Final: Each GPU has complete attention output for its Q chunk單卡內存佔用變成O(n²/p),p是GPU數量。8張卡的話內存需求直接砍到1/8。150k序列從84GB降到約10GB每卡。
Mesh2D:更激進的分片
序列特別長的時候Ring Attention的線性分片可能還不夠,這時候可以用Mesh2D把Q和K都切分了:
4 GPUs arranged in 2×2 mesh:
K₀ K₁
┌──────┬──────┐
Q₀ │GPU 0 │GPU 1 │
├──────┼──────┤
Q₁ │GPU 2 │GPU 3 │
└──────┴──────┘
Each GPU computes one tile of QKᵀ內存複雜度降到O(n²/p²)。64張卡組成8×8網格時,每卡內存需求下降64倍。
attn=mosaic.MultiAxisAttention(
embed_dim=128,
num_heads=8,
attention_axis=1,
backend="mesh2d",
mesh_shape=(8, 8)
)感知集羣拓撲的組合策略
在實際部署環境裏,不同GPU之間的通信帶寬差異很大。節點內GPU走NVLink能到900 GB/s,跨節點通過InfiniBand通常只有200 GB/s左右。
ComposedAttention就是針對這種拓撲特徵設計的:
# 4 nodes × 8 GPUs = 32 total
composed = mosaic.ComposedAttention(
mesh_shape=(4, 8), # (nodes, gpus_per_node)
head_parallel=True, # Split heads across nodes (slow link)
seq_parallel="ring" # Ring within nodes (fast link)
)需要更精細控制的話,可以用
HierarchicalAttention:
hier = mosaic.HierarchicalAttention(
intra_node_size=8,
intra_node_strategy="local", # Compute locally within node
inter_node_strategy="ring" # Ring between node leaders
)重通信走快鏈路輕通信才跨節點。
實現細節
整個庫大約800行Python,核心代碼如下:
class MultiAxisAttention(nn.Module):
def forward(self, x):
# 1. Move attention axis to seq position
x, inv_perm = self._permute_to_seq(x)
# 2. Flatten batch dims, project QKV
x = x.view(-1, seq_len, embed_dim)
qkv = self.qkv_proj(x).view(batch, seq, 3, heads, head_dim)
q, k, v = qkv.permute(2, 0, 3, 1, 4).unbind(0)
# 3. Dispatch to backend
out = self._attn_fn(q, k, v) # local, ring, or mesh2d
# 4. Project output, restore shape
out = self.out_proj(out.transpose(1, 2).reshape(...))
return out.permute(inv_perm)後端封裝了現有的成熟實現:
local後端調用
F.scaled_dot_product_attention(也就是FlashAttention),
ring後端用ring-flash-attn庫的
ring_flash_attn_func,
mesh2d是自定義的all-gather加SDPA,所有的底層都跑的是FlashAttention內核。
所有後端統一用FlashAttention的融合GEMM+softmax實現。後端函數在初始化時就綁定好,前向傳播不做分支判斷。張量操作儘量用
x.view()而不是
x.reshape(),保持內存連續性。集合通信的目標張量預分配好,避免
torch.cat的開銷。模塊級別做導入不在每次前向傳播時產生import開銷。
快速上手
安裝:
pip install git+https://github.com/stprnvsh/mosaic.git
# With ring attention support
pip install flash-attn ring-flash-attn單節點啓動:
torchrun --nproc_per_node=4 train.py多節點的話:
# Node 0
torchrun --nnodes=2 --nproc_per_node=8 --node_rank=0 \
--master_addr=192.168.1.100 --master_port=29500 train.py
# Node 1
torchrun --nnodes=2 --nproc_per_node=8 --node_rank=1 \
--master_addr=192.168.1.100 --master_port=29500 train.py訓練腳本示例:
import mosaic
import torch.distributed as dist
dist.init_process_group("nccl")
ctx = mosaic.init(sp_size=dist.get_world_size())
model = MyModel().to(ctx.device)
# Data is pre-sharded: each GPU has seq_total / world_size tokens
x_local = load_my_shard()
out = model(x_local) # Communication handled by Mosaic總結
最後,Mosaic不會自動並行化模型(這個用nnScaler),不管數據並行(PyTorch DDP/FSDP的事),也不處理模型分片(交給FSDP或Megatron)。
Mosaic專注於一件事:多軸注意力的分片路由,這套方案最初是給 nanoTabPFN 做的,一個表格數據Transformer。
這個模型要同時在rows(150k個)和features(5個)兩個維度做注意力。標準Ring Attention對維度語義沒有感知,它只認序列這個概念,分不清rows和features的區別。
所以Mosaic需求很明確:小軸本地算,大軸分佈式算,軸的路由邏輯不能侵入模型代碼,有興趣的可以試試。
https://avoid.overfit.cn/post/791e0f30540e4d289a43d01d383e8ab2
作者:Pranav Sateesh