
AidLux內置外設極速互連模塊,支持豐富的接口與外設,例如USB、LAN、WiFi、4G/5G、藍牙、GPS、陀螺儀、RS232、RS485、Arduino、機械臂、網絡相機、工業相機、深度相機等,即插即用。
這期內容我們就先挑其中的3類聊一聊:機械臂、工業相機和深度相機。
機械臂
説到利用安裝了AidLux的設備連接並控制機械臂,除了用於教學演示等的簡易裝置,精度高、功能強的工業機械臂也不在話下。按照國家標準定義,工業機械臂是應用於工業自動化中,具有自動控制操作機,可重複編程、多用途,並可以對3個以上軸進行編程的固定式或者移動式的機械電子裝置。
它可以把任一物件或工具按空間位姿(位置和姿態)的時變要求進行移動,從而完成某一工業生產的作業要求。比如夾持焊鉗或焊槍,對汽車或摩托車車體進行點焊或弧焊;搬運壓鑄或衝壓成型的零件或構件;進行激光切割;噴塗;裝配機械零部件等等。

AI控制機械臂是工業互聯網繞不開的一環,用電腦甚至工控機控制機械臂想必大家已經司空見慣,但通過安裝AidLux平台,安卓手機其實也能輕鬆接管控制工業機械臂,實現目標檢測、目標定位、目標跟蹤等功能。
10多萬的機械臂,被我用手機降服了!
工業相機
簡單來説,工業相機是指能穩定、高效地應用於工業現場的視頻圖像採集設備,其最本質的功能就是將光信號轉變成有序的電信號。
工業相機能夠在各種惡劣的環境下不間斷作業,具有高圖像穩定性、高傳輸能力和高抗干擾能力等特殊性,絕不能簡單地將其看做是拍攝工業現場和工業產品的相機,比如説工業現場安裝的監控攝像頭就不能算工業相機。安裝了AidLux的設備可以調用工業相機,例如用便攜小巧的移動設備控制實現工業流程中的視覺檢測需求。
AidLux控制機械臂工作過程中工業相機在定位芯片位置
工業相機目前在工業檢測、機器視覺、科研、軍事科學、航空航天等眾多領域都有廣泛的用途。例如在開發金屬材料及樹脂材料時,用來觀察材料受到衝擊時內部裂紋產生的方向、狀態等;在包裝和標籤印刷過程中實時檢測劃痕、灰塵、漏印、墨痕、褶皺等缺陷……

AidLux自研智能工業精密檢測設備中的工業相機負責進行視覺檢測
此外,工業相機的快門時間非常短,能夠拍攝高速運動的物體,如果把名片貼在電風扇扇葉上,以最大速度旋轉,設置合適的快門時間,用工業相機抓拍一張圖像,仍能夠清晰辨別名片上的字體。工業相機的這一特性也讓它能夠在體育項目中發揮一定的作用。類似捕捉棒球及高爾夫球擊球時球的狀態、乒乓球姿態動作分析等運動場上的黑科技畫面,所使用的高速相機也屬於工業相機的一種。
深度相機
相比傳統的相機而言,深度相機多了深度測量功能,能夠更方便、準確地感知周圍的環境及變化。“深度相機”四個字聽起來讓人有距離感,但大家對它的應用場景一定不會陌生,比如手機人臉解鎖/支付(iPhone X的前置深感攝像頭)、體感遊戲、活體檢測智能門鎖,又比如三維建模、無人駕駛,等等。AidLux對深度相機的輕鬆適配和靈活調用也能夠在一定程度上進一步拓寬其應用場景。

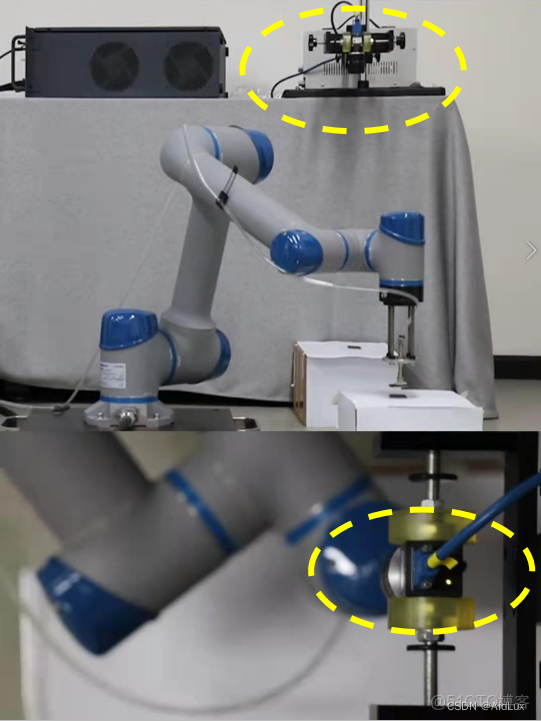
在機器人工作的許多場景中,深度相機也起着舉足輕重的作用。例如機器人巡檢時進行精確二次定位:
巡檢時需要機器人準確定位到某一個點,再通過機械臂控制,使機械臂末端的相機拍出穩定的圖片來實現算法識別,然而在機器人定位過程中會存在誤差問題,包括機器人面對機櫃距離誤差以及角度誤差。
如果利用深度相機的景深數據來感知機器人和機櫃的位置,通過算法運算控制機械臂實現穩定抓拍功能,則能夠根據實際測量距離值調整機械臂達到想要的最佳拍攝位置。當然,利用深度相機實現機器人跟隨、避障等效果也會更加迅捷、精準。
除此以外,深度相機還能助力智慧物流。比如掛車在裝載貨物時都需要根據庫存、掛車裝載量等信息進行實時調配,依靠人眼估算的話,效率低且不準確,如果在掛車上安裝深度相機,則可以實時測算出多台掛車的裝載量及進度,實現在最短的時間內裝載最多的貨物,提高空間利用率及裝載效率。
深度相機如今已經在小體積、高靈活度等方面越做越好,在移動設備上的環境適應能力進一步提高,其未來的應用場景也會越來越廣泛。