目錄
一、PBHC源碼下載
二、創建虛擬環境
三、安裝 Isaac Gym
四、安裝 rsl_rl
五、安裝Unitree 強化學習相關庫
5.1 安裝unitree_rl_gym
5.2 unitree_sdk2py(可選)
六、強化學習訓練
6.1 訓練命令
6.2 效果演示 Play
6.3 Mujuco 仿真驗證
在此記錄整個復現過程
一、PBHC源碼下載
首先下載源碼:
git clone https://github.com/TeleHuman/PBHC.git
二、創建虛擬環境
# 創建 conda虛擬環境
conda create -n unitree-rl python=3.8
# 激活虛擬環境
conda activate unitree-rl# 安裝 PyTorch
conda install pytorch==2.3.1 torchvision==0.18.1 torchaudio==2.3.1 pytorch-cuda -c pytorch -c nvidia或者使用
pip install torch==2.3.1 torchvision==0.18.1 torchaudio==2.3.1 --index-url https://download.pytorch.org/whl/cu118
三、安裝 Isaac Gym
3.1下載
Isaac Gym 是 Nvidia 提供的剛體仿真和訓練框架。首先,先在 Nvidia 官網

3.2解壓
tar -zxvf IsaacGym_Preview_4_Package.tar.gz
cd isaacgym/python
pip install -e .
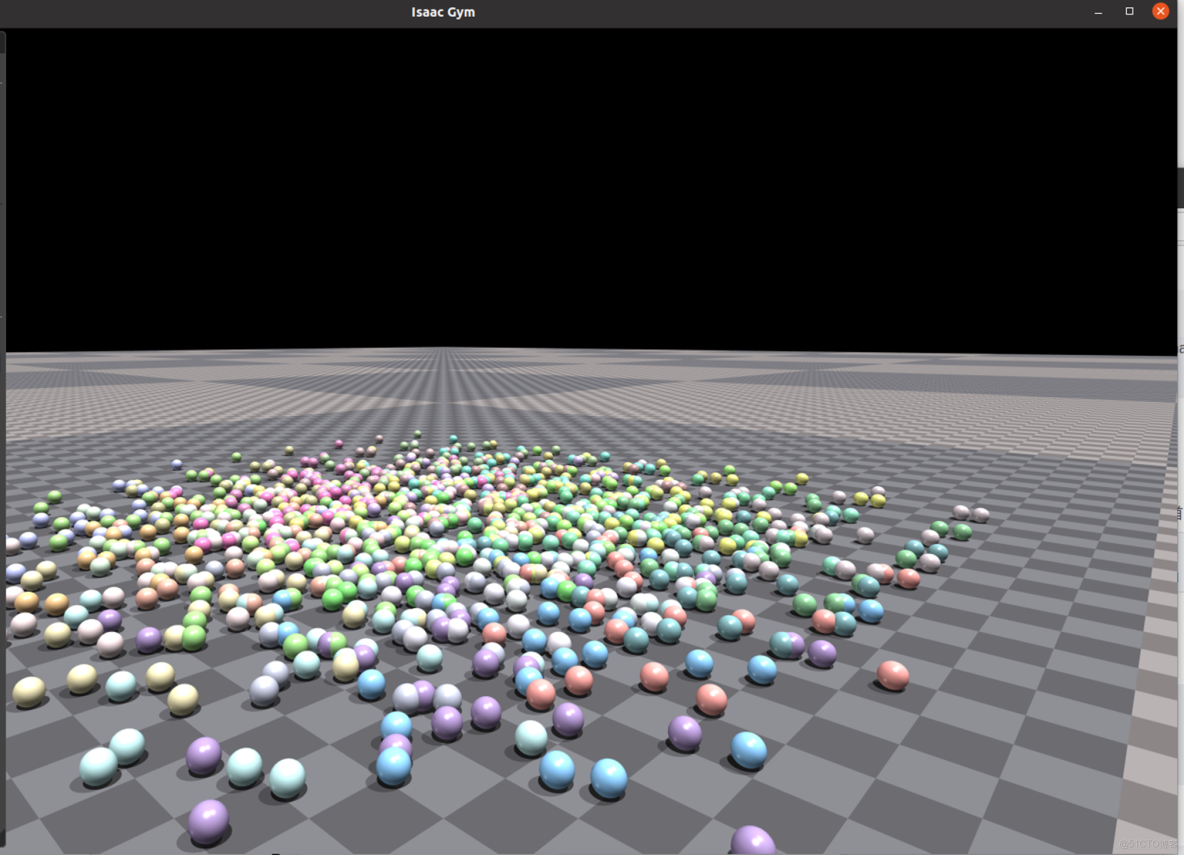
3.3驗證安裝
cd examples
python 1080_balls_of_solitude.py
四、安裝 rsl_rl
# 1. 克隆倉庫
git clone https://github.com/leggedrobotics/rsl_rl.git -b v1.0.2# 2. 安裝
cd rsl_rl
pip install -e .
五、安裝Unitree 強化學習相關庫
5.1 安裝unitree_rl_gym
git clone https://github.com/unitreerobotics/unitree_rl_gym.git
cd unitree_rl_gym
pip install -e .
5.2 unitree_sdk2py(可選)
unitree_sdk2py 是用於與真實機器人通信的庫。如果需要將訓練的模型部署到物理機器人上運行,可以安裝此庫。
git clone https://github.com/unitreerobotics/unitree_sdk2_python.git
cd unitree_sdk2_python
pip install -e .
六、強化學習訓練
6.1 訓練命令
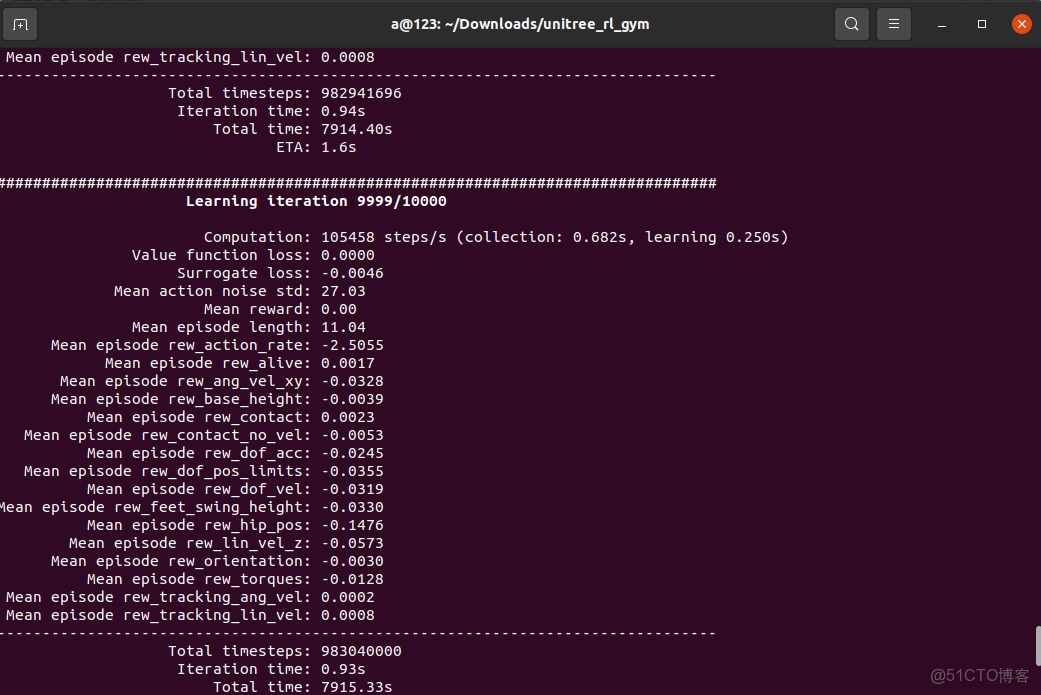
python legged_gym/scripts/train.py --task=g1 --headless
!!!訓練到9000次左右報錯,可參考如下鏈接解決:
https://github.com/unitreerobotics/unitree_rl_gym/issues/69
https://github.com/leggedrobotics/rsl_rl/pull/12/files
具體操作為在rsl_rl/utils/utils.py中增加和刪除對應的代碼:
trajectory_lengths_list = trajectory_lengths.tolist()
# Extract the individual trajectories
trajectories = torch.split(tensor.transpose(1, 0).flatten(0, 1),trajectory_lengths_list)
# add at least one full length trajectory
trajectories = trajectories + (torch.zeros(tensor.shape[0], tensor.shape[-1], device=tensor.device), )
# pad the trajectories to the length of the longest trajectory
padded_trajectories = torch.nn.utils.rnn.pad_sequence(trajectories)
# remove the added tensor
padded_trajectories = padded_trajectories[:, :-1]
trajectory_masks = trajectory_lengths > torch.arange(0, tensor.shape[0], device=tensor.device).unsqueeze(1)
trajectory_masks = trajectory_lengths > torch.arange(0, padded_trajectories.shape[0], device=tensor.device).unsqueeze(1)
return padded_trajectories, trajectory_masks
def unpad_trajectories(trajectories, masks):訓練結果如下:
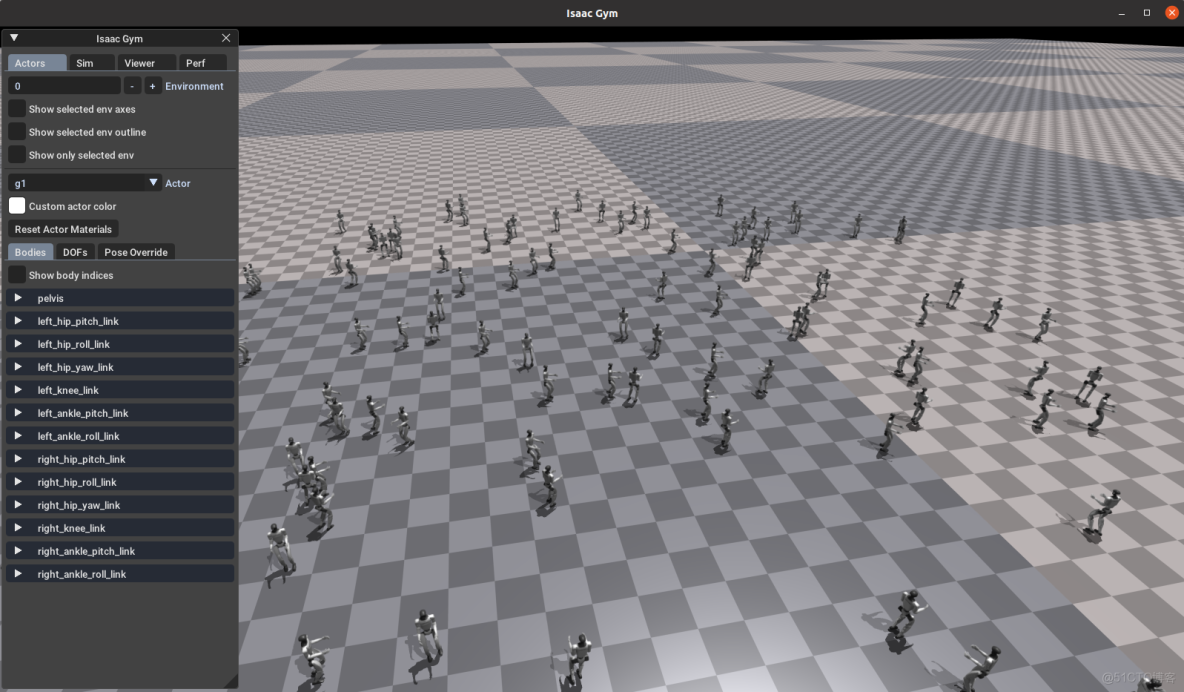
6.2 效果演示 Play
在 Gym 中查看訓練效果,可以運行以下命令:
python legged_gym/scripts/play.py --task=g1
# 生成僅一個模型
python legged_gym/scripts/play.py --task=g1 --num_envs=1
#使用指定路徑下模型進行測試(load_run不需要帶logs地址)
python legged_gym/scripts/play.py --task=g1 --num_envs=1 --load_run=Oct10_03-50-19_# 使用指定路徑下 指定模型進行測試(load_run不需要帶logs地址)
python legged_gym/scripts/play.py --task=g1 --num_envs=1 --load_run=Oct10_03-50-19_ --checkpoint=5000
結果如下:
!!!實際訓練到7000次就可以了,7000次左右以後的結果開始不正常
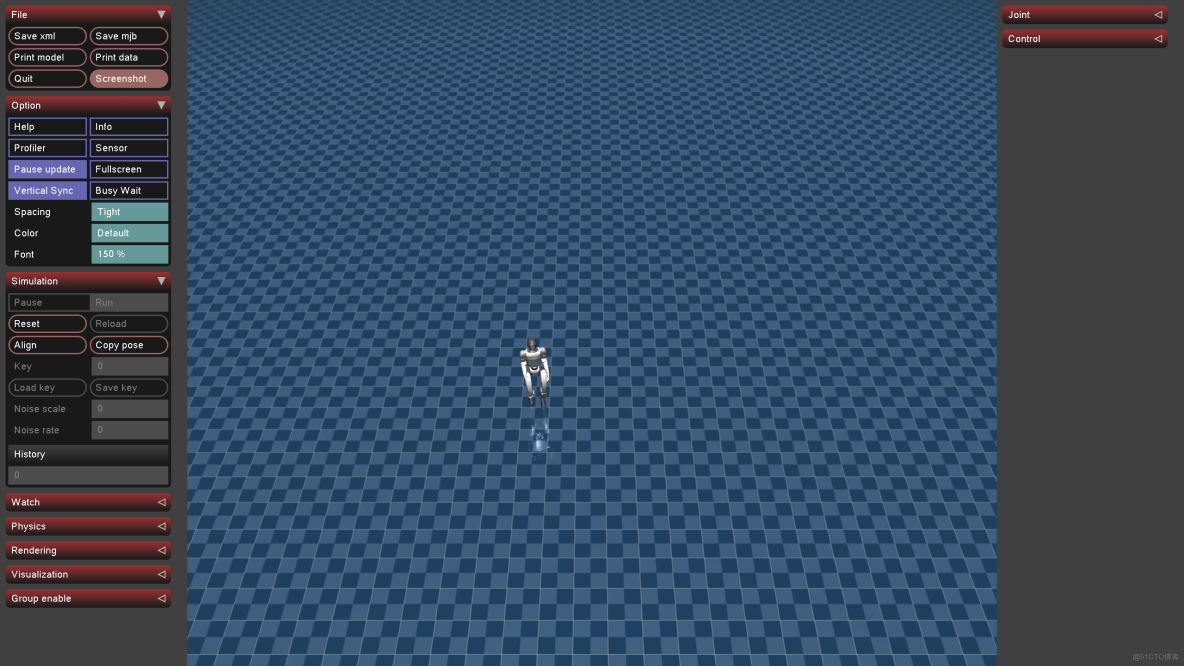
6.3 Mujuco 仿真驗證
python deploy/deploy_mujoco/deploy_mujoco.py g1.yaml
修改g1.yaml文件中的(policy_path):
#policy_path: "{LEGGED_GYM_ROOT_DIR}/deploy/pre_train/g1/motion.pt"
policy_path: "{LEGGED_GYM_ROOT_DIR}/logs/g1/exported/policies/policy_lstm_1.pt"
xml_path: "{LEGGED_GYM_ROOT_DIR}/resources/robots/g1_description/scene.xml"
# Total simulation time
simulation_duration: 60.0
# Simulation time step
simulation_dt: 0.002
# Controller update frequency (meets the requirement of simulation_dt * controll_decimation=0.02; 50Hz)
control_decimation: 10
kps: [100, 100, 100, 150, 40, 40, 100, 100, 100, 150, 40, 40]
kds: [2, 2, 2, 4, 2, 2, 2, 2, 2, 4, 2, 2]
default_angles: [-0.1, 0.0, 0.0, 0.3, -0.2, 0.0,
-0.1, 0.0, 0.0, 0.3, -0.2, 0.0]
ang_vel_scale: 0.25
dof_pos_scale: 1.0
dof_vel_scale: 0.05
action_scale: 0.25
cmd_scale: [2.0, 2.0, 0.25]
num_actions: 12
num_obs: 47
cmd_init: [0.5, 0, 0]結果還不錯: