
功能描述
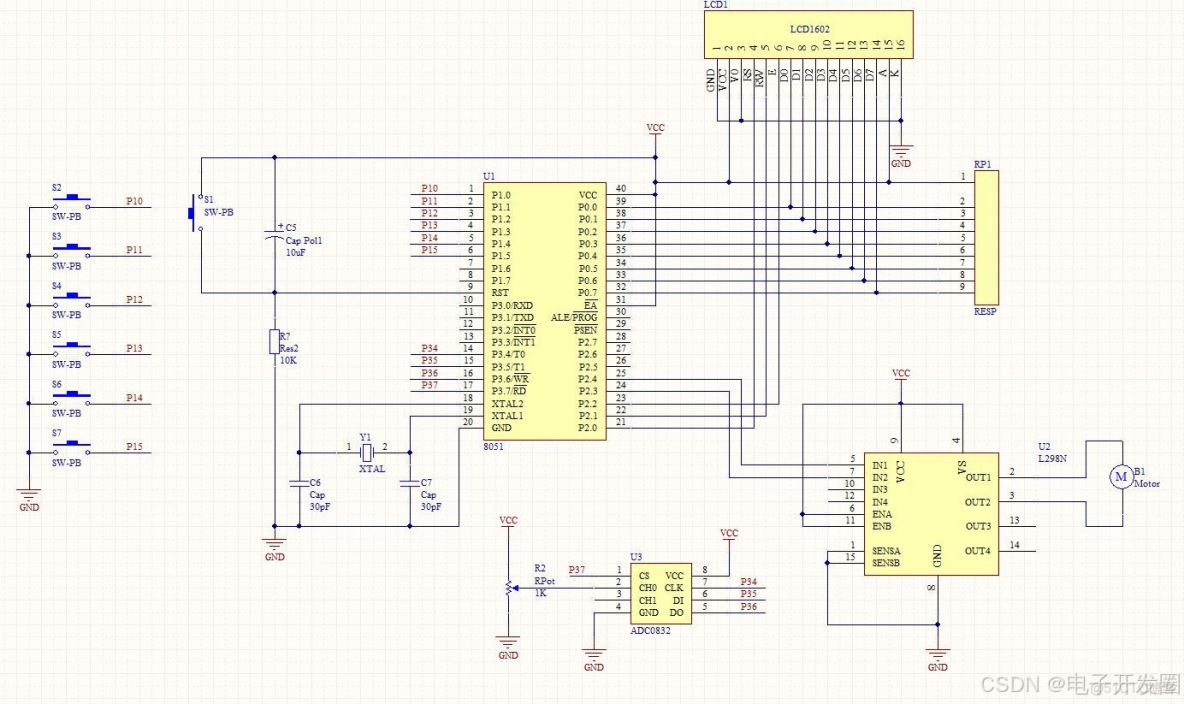
1、採用51單片機作為主控,實現位置控制;
2、採用L298驅動電機控制位置移動;
3、採用位移傳感器+AD0832檢測實時位置;
4、按鍵設置位置加減、啓停、速度加減;
5、當"實時位置"小於"設置位置"時,正轉;
6、當"實時位置"大於"設置位置"時,反轉;
7、當"實時位置"等於"設置位置"時,停止轉動;
8、採用1602顯示:實時位置、設置位置、轉速設置、系統狀態、按下鍵值;
9、系統狀態:right啓動、stop停止;
電路設計
採用Altium Designer作為電路設計工具。Altium Designer通過把原理圖設計、PCB繪製編輯、拓撲邏輯自動佈線、信號完整性分析和設計輸出等技術的完美融合,為設計者提供了全新的設計解決方案,使設計者可以輕鬆進行設計,熟練使用這一軟件必將使電路設計的質量和效率大大提高。
單片機管腳説明:
P0端口(P0.0-P0.7):P0口為一個8位漏極開路雙向I/O口,每個引腳可吸收8TTL門電流。當P1口的管腳第一次寫1時,被定義為高阻輸入。P0能夠用於外部程序數據存儲器,它可以被定義為數據/地址的第八位。在FIASH編程時,P0 口作為原碼輸入口,當FIASH進行校驗時,P0輸出原碼,此時P0外部必須被拉高。
P1端口(P1.0-P1.7):P1口是一個內部提供上拉電阻的8位雙向I/O口,P1口緩衝器能接收輸出4TTL門電流。P1口管腳寫入1後,被內部上拉為高電平,可用作輸入,P1口被外部下拉為低電平時,將輸出電流,這是由於內部上拉的緣故。在FLASH編程和校驗時,P1口作為第八位地址接收。
P2端口(P2.0-P2.7):P2口為一個內部上拉電阻的8位雙向I/O口,P2口緩衝器可接收,輸出4個TTL門電流,當P2口被寫“1”時,其管腳被內部上拉電阻拉高,且作為輸入。並因此作為輸入時,P2口的管腳被外部拉低,將輸出電流。這是由於內部上拉的緣故。P2口,用於外部程序存儲器或16位地址外部數據存儲器進行存取時,P2口輸出地址的高八位。在給出地址“1”時,它利用內部上拉優勢,當對外部八位地址數據存儲器進行讀寫時,P2口輸出其特殊功能寄存器的內容。P2口在FLASH編程和校驗時接收高八位地址信號和控制信號。
P3端口(P3.0-P3.7):P3口管腳是一個帶有內部上拉電阻的8位的雙向I/O端口,可接收輸出4個TTL門電流。當P3口寫入“1”後,它們被內部上拉為高電平,並用作輸入。作為輸入端時,由於外部下拉為低電平,P3口將輸出電流(ILL)。P3口同時為閃爍編程和編程校驗接收一些控制信號。
仿真設計
採用Proteus作為仿真設計工具。Proteus是一款著名的EDA工具(仿真軟件),從原理圖布圖、代碼調試到單片機與外圍電路協同仿真,一鍵切換到PCB設計,真正實現了從概念到產品的完整設計。

主程序設計
void main()
{
init_1602();
TMOD|=0X01;
TH0=(65536-10000)/256;
TL0=(65536-10000)%256;
ET0=1;//打開定時器0中斷允許
EA=1;//打開總中斷
TR0=1;//打開定時器
while(1)
{
//按鍵檢測
if(!k1)//啓動
{
start=1;
key=1;
}
if(!k2)//停止
{
start=0;
key=2;
}
if(!k3)//位置加
{
if(set<255)
set++;
key=3;
while(!k3);
}
if(!k4)//位置減
{
if(set>0)
set--;
key=4;
while(!k4);
}
if(!k5)//加速
{
if(speed<9)
speed++;
key=5;
while(!k5);
}
if(!k6)//減速
{
if(speed>0)
speed--;
key=6;
while(!k6);
}
//電機控制
if(start==1)
{
if(time<9)
time++;
else
time=0;
if(location<set)//正轉
{
if(time<speed)
{
out2=0;out1=1;
}
else
{
out2=1;
}
}
if(location>set)//反轉
{
if(time<speed)
{
out1=0;out2=1;
}
else
{
out1=1;
}
}
if(location==set)//停止
{
out1=1;
out2=1;
}
}
else
{
out1=1;
out2=1;
}
}
}