









MATLAB雷達定位系統仿真是一個涉及信號處理、目標檢測與跟蹤的複雜過程。
雷達定位仿真的核心步驟
一個典型的雷達定位仿真通常包含以下環節,其核心流程可歸納為:
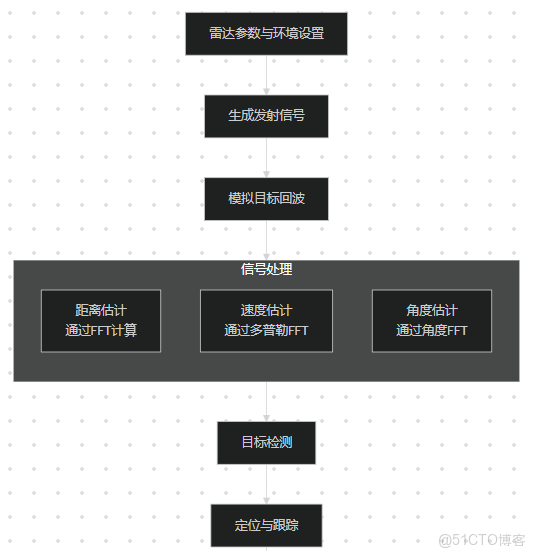
雷達系統參數設置與目標建模
仿真的第一步是定義雷達系統自身的工作參數和需要探測的目標特性。
雷達關鍵參數設置:
- 載波頻率:如77GHz(毫米波雷達常用)
- 帶寬:直接影響距離分辨率
- 脈衝重複頻率(PRF):影響最大不模糊距離和速度
- 天線陣列:天線個數和排列影響角度測量精度和波束形狀
目標與環境建模:
- 通常假設目標由多個散射點組成
- 可定義目標的初始位置、速度、雷達截面積(RCS)等
- 環境模型中可加入雜波(如地面雜波)和噪聲(如熱噪聲)
一個簡單的參數設置和信號生成示例如下:
% FMCW雷達參數設置
fc = 77e9; % 載波頻率 77GHz
B = 2e9; % 帶寬 2GHz
Tc = 1e-3; % Chirp週期 1ms
K = B / Tc; % 調頻斜率
c = 3e8; % 光速
lambda = c / fc; % 波長
% 目標參數
target_range = 5; % 目標距離 5米
target_velocity = 2; % 目標徑向速度 2m/s
target_angle = 30; % 目標方位角 30度
% 生成FMCW中頻信號
t = 0:1/(10*B):Tc; % 採樣時間
f_IF = 2*K*target_range/c; % 中頻信號頻率
s_IF = cos(2*pi*f_IF*t + pi*K*t.^2); % 中頻信號信號處理與參數估計
雷達接收到的中頻信號需要經過一系列處理才能提取出目標信息。
距離估計
通過距離FFT將時域信號轉換為頻域,找到峯值對應的頻率,進而計算目標距離:
% 距離FFT
N_r = 1024; % FFT點數
fft_r = fft(s_IF, N_r);
f_r = (0:N_r-1)*(10*B)/N_r; % 頻率軸
R_est = (c * f_r) / (2*K); % 距離軸
% 尋找峯值位置,估計目標距離
[~, idx_r] = max(abs(fft_r));
R_result = R_est(idx_r);速度估計
利用多普勒效應,通過多個Chirp之間的相位變化估計目標速度:
% 多普勒FFT(需要多個Chirp數據)
N_c = 64; % Chirp個數
phase_diff = 4*pi*target_velocity*Tc/lambda; % 相鄰Chirp相位差
fft_d = zeros(1, N_c);
for i = 1:N_c
s_IF_i = s_IF .* exp(1j*(i-1)*phase_diff); % 添加相位差
fft_d(i) = fft(s_IF_i, N_r)(idx_r); % 提取目標頻率點
end
fft_d = fft(fft_d);
v_est = (lambda * (-N_c/2:N_c/2-1)*Tc*N_c) / (4*pi*Tc); % 速度軸
[~, idx_v] = max(abs(fft_d));
v_result = v_est(idx_v); % 估計速度角度估計
使用多個接收天線,通過相位干涉法估計目標角度:
% 角度FFT(需要多個接收天線)
N_ant = 8; % 接收天線數
d_ant = lambda/2; % 天線間距
phase_ant = 2*pi*d_ant*sind(target_angle)/lambda; % 相鄰天線相位差
fft_a = zeros(1, N_ant);
for i = 1:N_ant
s_IF_ant = s_IF .* exp(1j*(i-1)*phase_ant); % 添加天線相位差
fft_a(i) = fft(s_IF_ant, N_r)(idx_r); % 提取目標頻率點
end
fft_a = fft(fft_a, 180); % 補零到180點,提升角度分辨率
theta_est = (-90:89); % 角度軸(-90~89度)
[~, idx_a] = max(abs(fft_a));
theta_result = theta_est(idx_a); % 估計方位角目標檢測與跟蹤
恆虛警率(CFAR)檢測
在雷達信號處理中,恆虛警率(CFAR)檢測是關鍵步驟,用於在噪聲和雜波背景中自動檢測目標,同時保持恆定的虛警概率。其基本原理可概括為:
- 滑動檢測窗口:對信號進行掃描,逐個單元進行檢測。
- 自適應閾值:在每個待檢測單元(CUT)周圍設置參考單元(保護單元用於防止目標能量泄漏,訓練單元用於估計噪聲水平),根據訓練單元計算局部噪聲功率,再根據設定的虛警概率計算檢測閾值。
- 目標判定:如果待檢測單元的信號功率超過閾值,則判定為目標。
軌跡跟蹤(卡爾曼濾波)
卡爾曼濾波通過“預測-更新”兩個步驟,對目標運動狀態進行最優估計:
% 卡爾曼濾波初始化
% 狀態向量: [x; vx; y; vy]
A = [1, dt, 0, 0; % 狀態轉移矩陣
0, 1, 0, 0;
0, 0, 1, dt;
0, 0, 0, 1];
H = [1, 0, 0, 0; % 觀測矩陣
0, 0, 1, 0];
% 預測步驟
x_pred = A * x_est; % 狀態預測
P_pred = A * P_est * A' + Q; % 誤差協方差預測
% 更新步驟
z = [measured_x; measured_y]; % 實際觀測值
y = z - H * x_pred; % 創新向量
S = H * P_pred * H' + R; % 創新協方差
K = P_pred * H' / S; % 卡爾曼增益
x_est = x_pred + K * y; % 狀態更新
P_est = (eye(4) - K * H) * P_pred; % 協方差更新參考代碼 matalb 雷達定位系統仿真 www.youwenfan.com/contentcnl/78865.html
高級功能與仿真工具
除了基本的信號處理,MATLAB還提供了一系列高級工具和功能,可以構建更復雜的雷達仿真系統:
- 相控陣系統工具箱:提供用於設計、模擬和分析相控陣雷達系統的工具和算法。
- 雷達系統設計器:一個交互式工具,允許您通過圖形界面設計和分析雷達系統。
- 信號處理工具箱:包含一系列信號處理算法,可用於雷達信號生成、濾波、統計信號處理等。
- 傳感器融合與跟蹤工具箱:提供跟蹤濾波器、數據關聯算法和多傳感器融合工具。
一個簡單的雷達定位仿真示例
下面展示了一個簡化的雷達定位仿真流程:
% 初始化參數
clear; clc;
fc = 77e9; B = 2e9; Tc = 1e-3; K = B/Tc;
c = 3e8; lambda = c/fc;
% 目標設置
targets = [100, 10, 30; % [距離(m), 速度(m/s), 角度(度)]
150, -5, -10];
% 仿真循環
for i = 1:size(targets, 1)
% 生成回波信號
[s_IF, t] = generate_echo_signal(targets(i, :), fc, K, c, Tc, B);
% 距離估計
[R_est, fft_r] = range_estimation(s_IF, K, c, B);
% 速度估計
v_est = velocity_estimation(s_IF, targets(i,2), Tc, lambda, R_est, B);
% 角度估計
theta_est = angle_estimation(s_IF, targets(i,3), lambda, R_est, B);
% 顯示結果
fprintf('目標%d: 估計距離=%.2fm, 估計速度=%.2fm/s, 估計角度=%.2f度\n', ...
i, R_est, v_est, theta_est);
end
% 繪製距離頻譜
figure;
plot((0:1023)*c/(2*K*1024), abs(fft_r));
xlabel('距離 (m)'); ylabel('幅度');
title('距離FFT結果');
grid on;
本文章為轉載內容,我們尊重原作者對文章享有的著作權。如有內容錯誤或侵權問題,歡迎原作者聯繫我們進行內容更正或刪除文章。