
前言:AGV/AMR/機器狗乘梯控制系統方案,該系統通過梯控與電梯門禁集成實現自動化設備無人化乘梯。核心功能包括自主呼梯、樓層切換及多場景門禁擴展,支持RS-485、MQTT等多種通訊協議。方案詳細説明了乘梯流程、特殊場景處理及電梯改造要點,強調需保持電梯無休眠狀態,並確保電氣隔離。系統採用"感知-控制-通信"架構,可擴展至閘機等門控設備,構建智能通行生態。建議聯繫技術支持獲取定製化方案,包括電梯適配確認、協議選擇等具體實施細節。
一、核心功能與系統定位
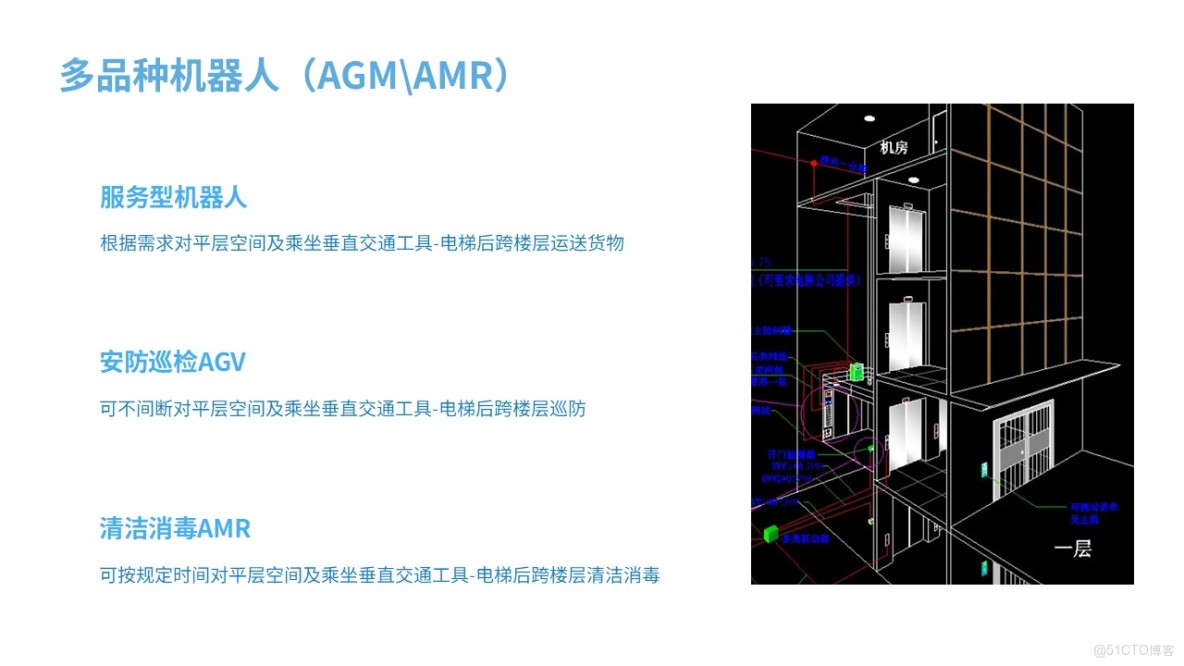
該系統旨在實現AGV、AMR、機器狗等自動化設備的無人化乘梯需求,通過梯控與電梯門禁的集成,支持設備自主呼梯、乘梯及樓層切換,並可擴展至閘機、快速門、捲簾門、玻璃門、防火門等多場景門禁控制,適用於智能工廠、物流倉儲、商業樓宇等自動化場景。
二、通訊與接口規範
- 推薦通訊方式
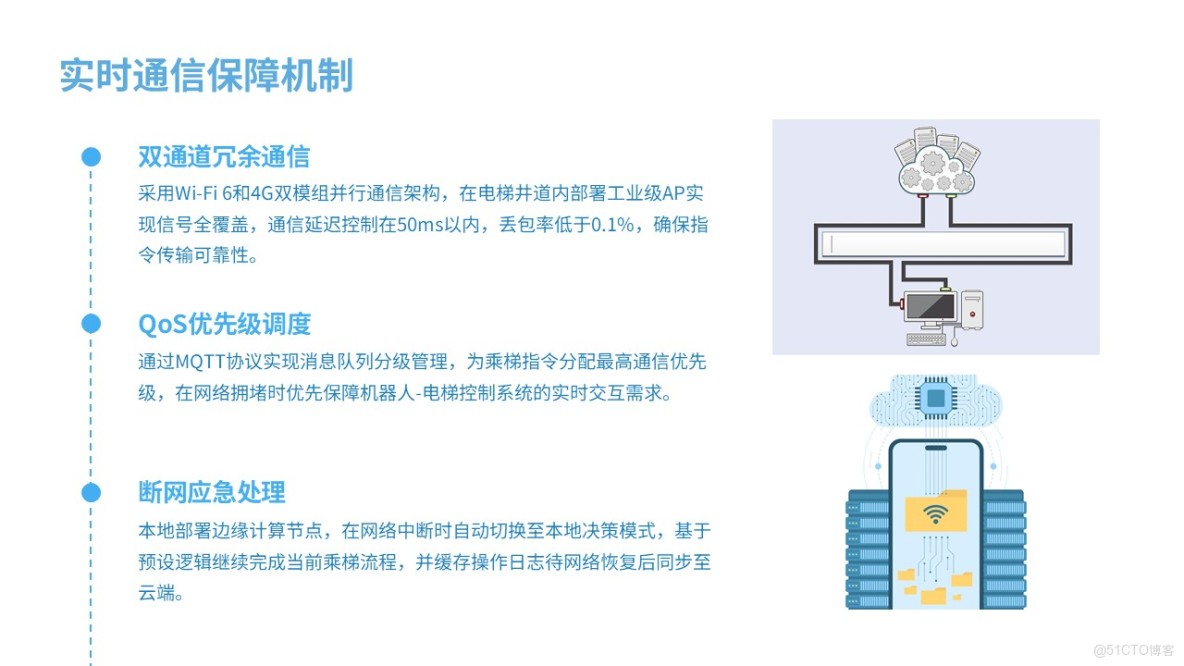
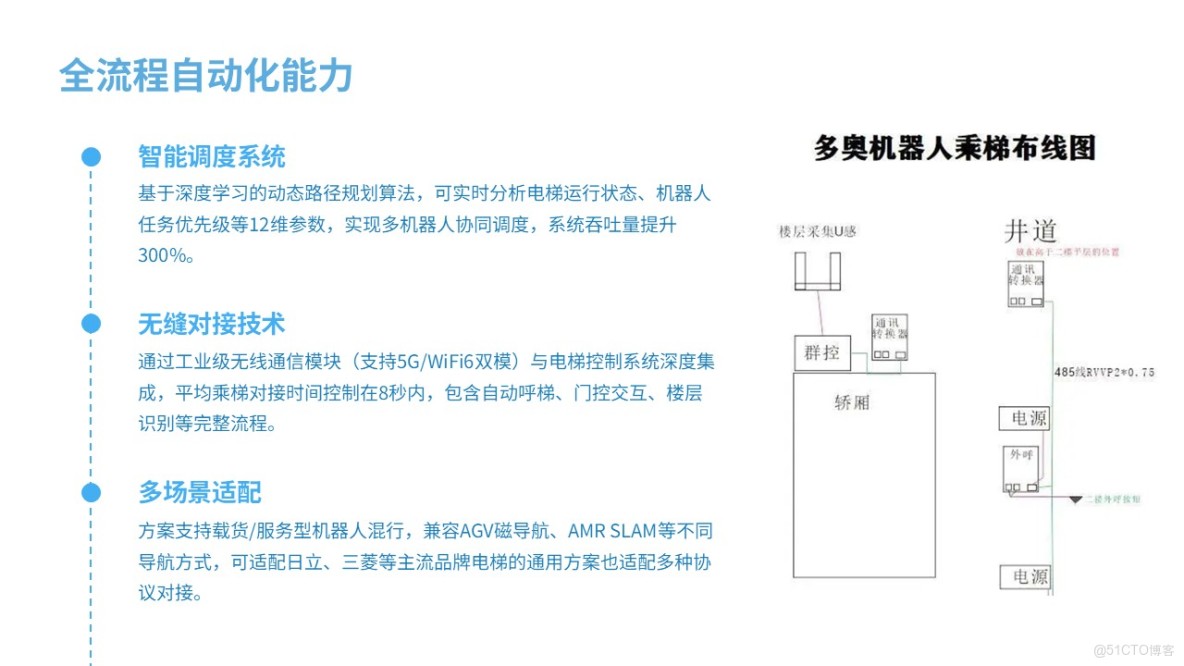
- RS-485:需支持雙工通訊及電梯運行狀態實時反饋
- 其他協議:MQTT/TCP/HTTP/4G/5G/LORA/Modbus TCP/RTU(需諮詢多奧技術支持)
- 不推薦使用422/232等傳統接口
- 信號交互要求
- 持續輪詢轎廂運行狀態
- 呼梯指令需包含實時狀態查詢機制
三、特殊場景處理
- 電梯門配置
- 單開門默認使用主門
- 貫通門/雙開門(主操/副操/殘操)需定製方案
- 電源與節能模式
- 梯控取電必須在電梯電源前端
- 需保持電梯無休眠狀態,休眠功能不得影響實際使用
- 特殊按鍵類型
- 觸摸屏按鍵、觸摸按鍵、協議模式、DOP等需專項方案(諮詢多奧)
四、乘梯流程示例
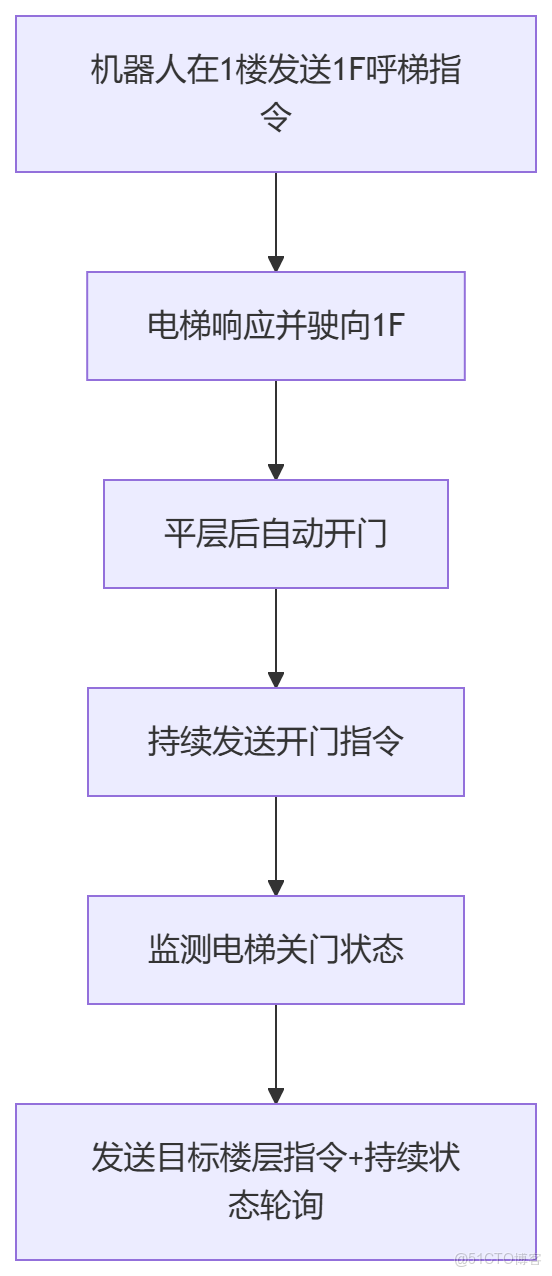
4.1所在樓層
機器人在1樓 → 發送1F呼梯指令 → 梯控觸發外呼 → 電梯到達1F開門 → 梯控持續發送開門信號(≥30秒) → 機器人進入轎廂 → 檢測到機器人進入 → 梯控停止發送開門信號 → 電梯正常關門(或梯控發送關門指令) → 電梯運行至目標樓層
sequenceDiagram
participant Robot
participant DOA_TK as 多奧梯控
participant Elevator
Robot->>DOA_TK: 發送1樓呼梯指令(外呼A模式)
DOA_TK->>Elevator: 登記指令,持續發送開門保持信號
Elevator-->>DOA_TK: 實時反饋狀態(運行中/到達1樓)
Elevator->>Elevator: 平層開門
Robot->>DOA_TK: 循環發送開門指令(確保進入)
Robot->>DOA_TK: 檢測關門狀態後發送目標樓層(內呼B模式)
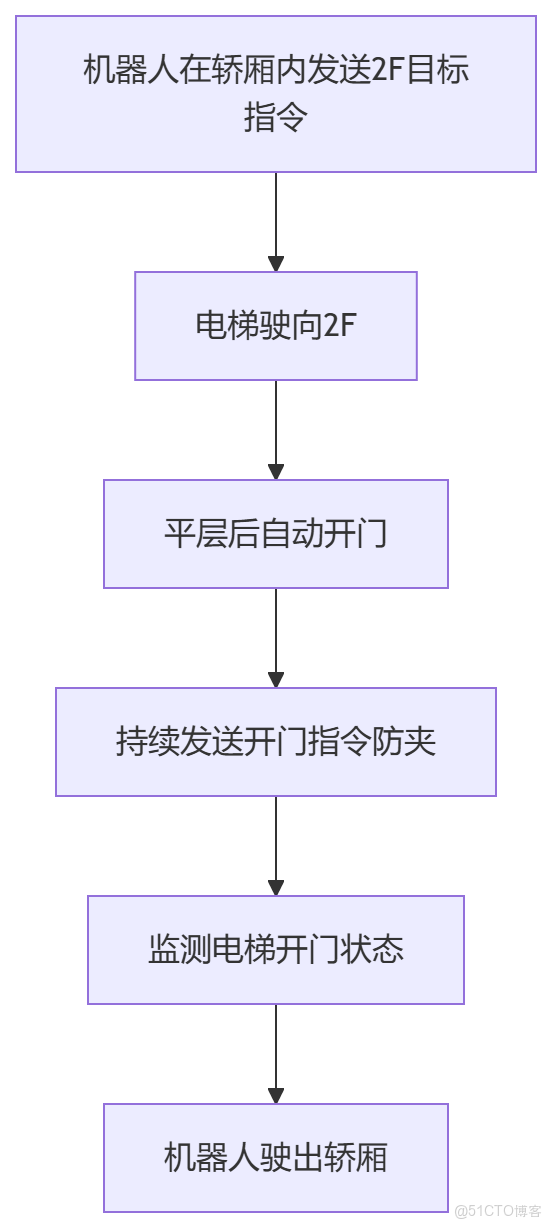
4.2目的樓層
機器人在轎廂內 → 發送目標樓層(如2F)指令 → 梯控觸發轎廂內2F按鈕 → 電梯運行至2F平層 → 梯控發送開門信號 → 機器人離開 → 檢測到機器人離開 → 梯控停止發送開門信號 → 電梯正常運行
sequenceDiagram
participant Robot
participant DOA_TK as 多奧梯控
participant Elevator
Robot->>DOA_TK: 發送2樓指令(內呼B模式)
Elevator-->>DOA_TK: 實時反饋運行狀態
Elevator->>Elevator: 到達2樓平層開門
Robot->>DOA_TK: 循環發送開門指令(確保安全離開)
DOA_TK->>Elevator: 維持開門直至機器人離梯
五、擴展功能與諮詢建議
- 多場景門禁控制:系統可擴展至閘機、快速門、防火門等設備的聯動控制,實現自動化設備跨區域移動的全流程無人化管理。
- 技術諮詢:針對呼梯模式差異、特殊電梯協議(如協議模式、DOP)、觸摸屏適配等問題,建議聯繫多奧售前技術團隊獲取定製化方案。

六、實施要點與注意事項
- 電梯改造要點
- 梯控取電必須在電梯前端,獨立於電梯控制系統
- 電梯參數調整:關閉節能休眠、取消防搗蛋功能、延長開門時間
- 確保梯控與電梯系統電氣隔離,不影響原有安全性能
- 機器人適配
- 需集成通信模塊 (如 RS485 轉 USB、Wi-Fi 或 4G 模組)
- 安裝位置傳感器 (激光雷達 / 紅外),精確停靠電梯門口 (誤差 < 5cm)
- 開發專用 SDK,實現與梯控系統指令交互
七、總結與下一步
多奧 AGV/AMR/ 機器狗乘梯控制系統通過 **"感知 - 控制 - 通信"** 三層架構,實現了機器人與電梯的無縫協同,可擴展至閘機、各類門控設備,構建完整的智能通行生態。
下一步建議:聯繫多奧售前技術團隊,獲取針對您特定場景的詳細方案,包括:
- 電梯品牌與型號適配確認
- 通信協議選擇建議
- 硬件配置清單與報價
- 現場勘測與實施計劃
注:本方案基於多奧最新 V10.8 版本系統,實際實施可能因電梯型號、現場環境略有調整,建議與多奧技術人員確認最終方案。
