
探討一下AGV機器人和AMR與電梯控制系統(梯控)高效對接的方法和技術。
前言:為了實現精準對接,梯控需引出485通訊線連接到機器人控制器,確保信號傳輸穩定,減少干擾和延遲。電梯梯控與機器人/AGV/AMR聯動器的電源應分開設置,RS-485通訊既可點對點也可通過485HUB實現多設備間的靈活通信,適應多種場景下的電梯資源共享需求。此外,通過網線與現場AP建立TCP/IP、HTTP或modbus-tcp或RTU等協議的局域網連接,保障數據傳輸的高速穩定,並支持系統的升級和擴展。最後展望了未來技術的發展將使對接更加智能化,提高生產生活的便利性和效率。
一,AMR機器人AGV自動乘梯所需的配置清單。
包括電梯狀態檢測器(DAIC-DT-ZT),用於實時監測電梯運行狀態並及時報警;樓層傳感器(DAIC-DT-LC),採用U感技術精準感知轎廂所在樓層;機箱(DAIC-DT-JX),為電子元件提供安全穩定的工作環境;電源(DAIC-DT-P),保障檢測設備的電力供應;呼梯控制器(DAIC-DT-WH),通過RS-485組網實現準確調度;電源及485線(RVV4*0.2)、外呼按鍵線(RVV2*0.2),確保電源和信號的可靠傳輸;無線收發器(DAIC-DT-WXSF),用於遠程傳輸電梯運行狀態;外呼機箱電源(DA-02/12V/5A),為外呼系統提供穩定電力;無線中繼器(DAIC-DT-ZJ),增強無線信號覆蓋範圍;以及協議對接的收費規則。

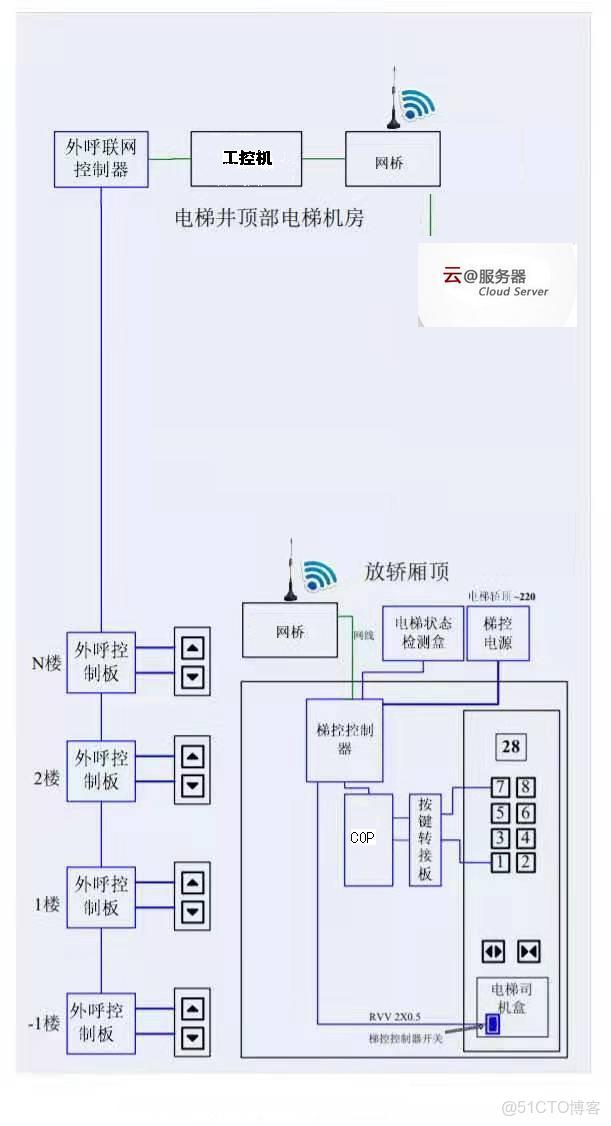
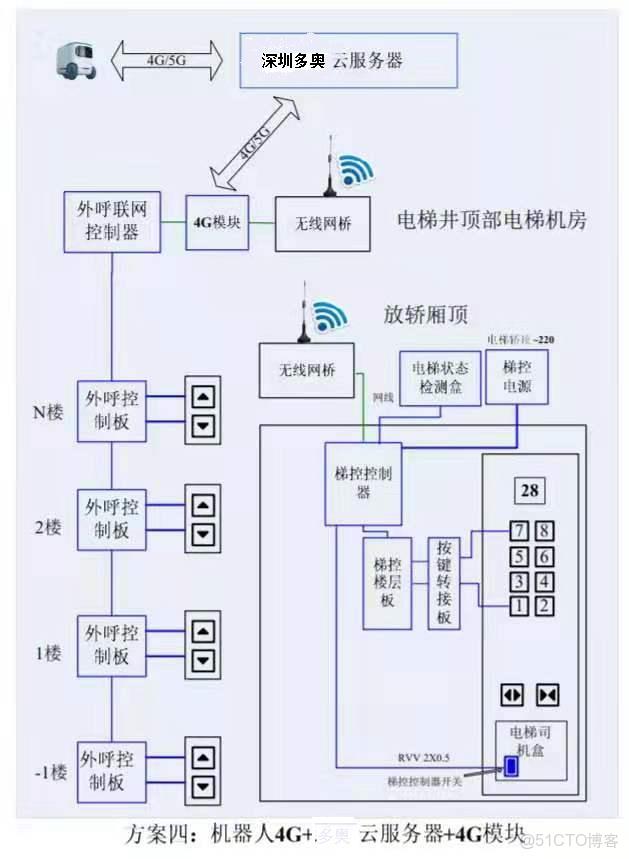
二,深入解析了智能電梯協同AMR機器人AGV自動乘梯系統的設備構成、空間佈局及其優化方法。
首先,介紹了核心感知中樞,包括電梯狀態檢測器、樓層傳感器等設備的功能和安裝位置;其次,闡述了智能通信網絡,強調呼梯控制器和無線收發器在通信中的關鍵作用;再者,分析了能源與信息脈絡,如轎廂頂電源和定製線纜的作用;接着,提出了信號強化矩陣的概念,無線中繼器用於增強高層建築的信號傳輸。此外,還探討了協議對接的經濟哲學、工程實施中的電力安全冗餘和電磁和諧之道、典型場景配置以及系統的定期維護方法。最後,提供了針對不同品牌AGV/AMR的定製化技術服務。
總結:詳細解析了AMR機器人AGV自動乘梯系統的電梯外呼內召及轎廂運行狀態監測設備清單,涵蓋設備功能、安裝要點及潛在需求。核心設備包括電梯狀態檢測器、樓層傳感器、呼梯控制器和無線收發器等,分別負責實時監測電梯狀態、精準定位樓層、管理和傳輸信號。針對高層建築,建議配置無線中繼器以增強信號覆蓋。文中還介紹了協議對接的成本優化策略,強調了安裝實施中的電源冗餘設計、電磁兼容性和無線信號測試的重要性,並提供了典型應用場景配置示例和維護注意事項。

三,機器人/AGV/AMR 如何順利切換乘梯的梯控專用模式或人工模式。
要實現模式切換,需持有有效梯控卡的員工在外呼電梯門禁讀卡器處刷卡,而機器人則可通過485通訊、TCP/IP、HTTP協議或modbus-tcp等方式申請使用電梯並完成模式切換。針對非標模式的人工切換,如人機混用、員工專用或AGV/AMR專用,文中列舉了AGV電梯控制主板的權限管理、樓層觸點擴展板對按鍵權限的管控、電梯狀態檢測器監測轎廂狀態、U感技術的樓層傳感器、按鍵控制線連接樓層、層控機箱電源位置、無線收發器設置、外呼控制器管控權限、AGV模式切換讀卡器的位置及外呼電源箱的安放位置等具體設施與功能。
四,讓AMR機器人AGV自動乘梯意義
為何要讓AMR機器人AGV自動乘梯即使用垂直交通工具電梯呢?
①解決AGV機器人和AMR在實際應用中與電梯控制系統的對接問題;
②提升不同場景下如工廠、辦公樓等場所的運輸效率和自動化水平。
使用場景及目標:
①幫助技術人員瞭解AMR機器人AGV自動乘梯所需的核心硬件配置且幫助技術人員理解智能電梯與AGV/AMR機器人的協同工作原理;
②指導項目實施,確保各部件正確選型和安裝,指導設備選型、安裝和維護,確保系統穩定運行;
③為項目經理提供成本估算依據,特別是針對協議對接費用的理解,為項目規劃提供參考,優化資源配置和技術方案設計。;
五,其他説明:瞭解這些設施與功能有助於提高機器人/AGV/AMR乘梯的安全性和效率,確保其在不同模式下的穩定運行。在實際應用中,應根據項目具體情況靈活調整設施配置。
六,十幾年老司機專業建議:本文內容詳實,涵蓋了從設備選型到系統維護的全流程,建議讀者結合實際應用場景,重點關注設備安裝位置、信號傳輸優化及定期維護的具體措施,同時可根據自身需求選擇合適的協議對接和服務方案,還有不明白的可諮詢多奧售前,免費羊毛可以薅。
