
機器人(狗)AGV\AMR乘梯控制系統方案設計書
本方案設計了一套完整的智能機器人(AGV/AMR/機器狗)自主乘梯控制系統。系統通過獨立傳感器網絡實時監測電梯運行狀態(樓層/門狀態/轎廂環境),採用無源節點安全控制電梯運行,支持MQTT/Modbus等多種協議與機器人交互。核心功能包括:精準樓層定位、安全門狀態檢測、活物識別、網絡化遠程控制等,實現機器人自主呼叫電梯、登記樓層、安全進出轎廂的全流程自動化。系統採用模塊化設計,兼容各類電梯品牌,提供有線/無線多種組網方案,滿足智慧樓宇中機器人物流配送、巡檢等垂直運輸需求。

前言:智能機器人乘梯控制系統是用來幫助機器人在乘坐電梯時獲取電梯的樓層信息,轎廂門開關狀態,以及幫助機器人呼叫電梯和登記目的樓層的控制系統。機器人是時代發展的趨勢,機器人服務會成為生活,工作中重要的部分,用長遠的眼光去部署機器人應用是時代的選擇,也是佔領智慧園區(社區)、智慧醫療、智能酒店、智能寫字樓(建築)建設的科技制高點的必要條件。智能建築不僅要考慮人、車的通行出入口控制系統,機器人(狗)AGV\AMR的通行門禁、閘機及乘坐垂直交通工具--電梯也成為必需。多奧機器人自主乘梯系統,可以不斷享受到系統升級特別是項目功能定製帶來的優越體驗感,以及不斷適應物聯網發展的剛性需求。智能梯控系統與機器人進行協議(MQTT\TCP\HTTP\RS-485\Modbus TCP或RTU等)對接,通過協議對接的方式實現機器人自主乘梯。機器人自主乘梯可根據實際項目需求,提供局域網乘梯方案或4G\5G互聯網乘梯或LORA近場通訊等方案。
AGV/AMR/機器狗無人化乘梯系統集成梯控與門禁,支持多場景擴展,採用"感知-控制-通信"架構,需保持電梯無休眠,支持多種通訊協議,適用於智能工廠及物流場景。
一、智能梯控系統功能及特點
1、當梯控接受到AGV機器人\AMR\機器狗指令需要不停給電梯發送開門命令控制開門時,電梯本身不能有開門超時強制關閉邏輯(電梯本身功能),不能超時影響到開門指令;同理,其他樓層按鍵連續接受指令也不能取消登記,即電梯防搗蛋功能能需取消;電梯關門指令一般情況下由電梯本身邏輯實現,也可由多奧梯控接受AGV、機器人、AMR、機器狗關門信號去控制。
2、智能梯控與機器人、機器狗、AGV\AMR如採用RS-485對接需雙工通訊且實時反饋電梯運行狀態;其他如:MQTT\TCP\HTTP\4G\5G\LORA\Modbus TCP或RTU等)對接請諮詢多奧售前技術人員瞭解方案;現在422/232很少用。
3、電梯如有節能模式(特別提醒梯控取電必須在前端)儘量讓電梯保持無休眠狀態,假如有休眠也不應對實際使用電梯產生影響。
4、當梯控接受到AGV\機器人\AMR\機器狗指令登記(呼梯)成功之後,電梯應響應且駛向所在樓層,平層後打開門;如若電梯就在當前樓層,呼梯(注意有兩種模式:A,真正的外呼呼梯即轎廂外上下按鍵;B,轎廂內所在樓層按鍵)之後無論是那種模式均可開門。
5、單開門電梯多奧梯控默認使用主門;如電梯是貫通門或雙開門(主操、副操、殘操)請提前告知多奧落實具體方案。
6、電梯現場梯控改造完成後,多奧有測試工具通過DEMO發送模擬數據驗證機器人、機器狗、AGV、AMR乘梯流程。
7、智能呼梯為何有兩種模式:A,轎廂外上下按鍵;B,轎廂內樓層按鍵?請諮詢多奧。
8、特殊情況:觸摸屏按鍵、電梯觸摸按鍵、協議模式、DOP等請諮詢多奧瞭解方案。

硬件設備功能特點介紹
1 、純硬件獨立的感知傳感系統,不依賴電梯本身器件獲取轎廂運行狀態信息跟電梯PLC無關,可以適配各種品牌型號的電梯,當然多奧也可以走協議對接(需電梯公司支持)。
2、梯控使用無源節點連接,與原電梯系統完全隔離,不會對電梯原有性能產生任何影響。
3、佈線超級簡單,電梯門禁系統提供網絡接口,客户可以採用WIFI或者4G聯網方式,佈線簡單,施工方便。
4 、十多年就只做梯控讓多奧有在寫字樓、醫院、酒店等繁忙環境中長時間服務的案例,系統久經考驗,穩定可靠。
5 、為機器人(狗)AGV\AMR公司對接梯控提供詳細的協議資料,並提供乘梯系統模擬DEMO程序。
二、電梯門禁系統設備及相關參數
梯控主板通信接口 RS485,TCP,Modbus
控制樓層 樓層擴展板控制16層樓,最大可以驅動4個樓層擴展板控制64層(如有更高樓層,請諮詢多奧獲取方案)
樓層傳感器 2路光電信號感知
開關門傳感器 有源接近開關
陀螺儀
激光測距
貨物檢測
人體(活物)檢測
U感
RFID樓層標籤
RFID讀卡器
工作電壓 12V直流
工作電流 正常工作約200mA
工作温度 -10~70℃
工作濕度 15~95%
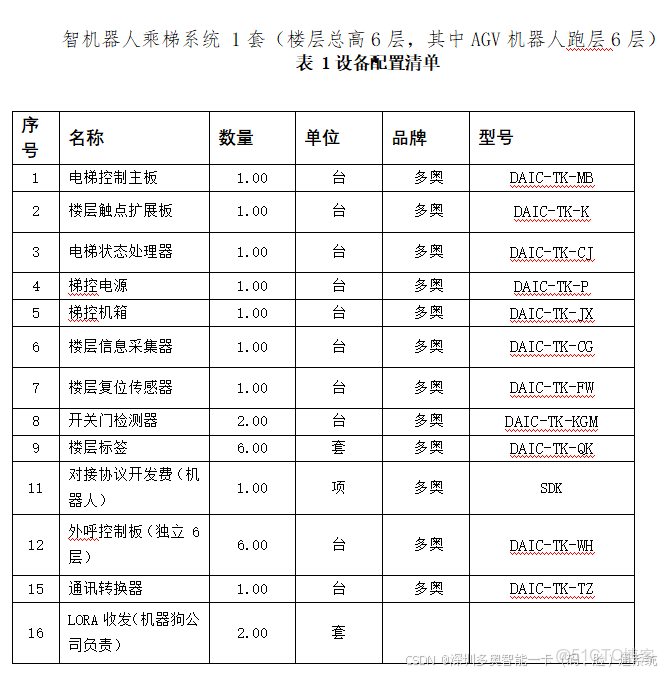
三、梯控設備主要清單
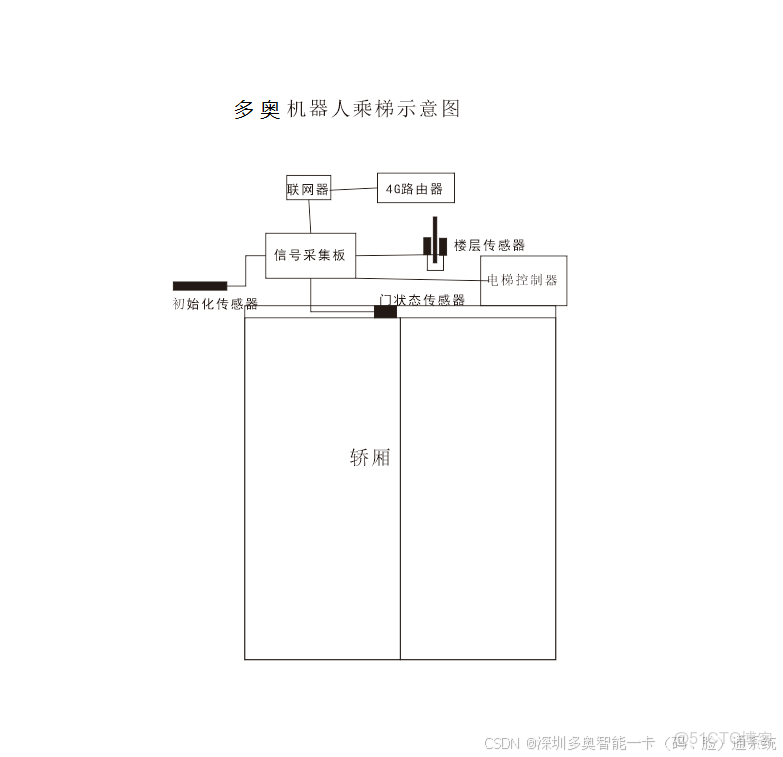
智能機器人乘梯層控型電梯控制系統包括:智能電梯控制器、樓層觸點擴展板、 貨物(人體)傳感器、開關門檢測器、樓層傳感器、聯網器、信號採集器板。
梯控主板:控制電梯按鈕,包括樓層按鈕和開門按鈕
樓層傳感器:獲取電梯的樓層信息
活物傳感器:裝在電梯轎廂頂,人體感應
四、電梯轎廂運行狀態
開關檢測門傳感器:檢測電梯轎廂門的開關狀態
信號採集處理板:接入傳感器,處理傳感器信息,並和機器人進行交互
聯網器(協議對接轉換):可接入路由器或交換機,乘梯設備接入網絡用
多奧AGV/AMR/機器狗乘梯控制系統方案,該系統通過梯控與電梯門禁集成實現自動化設備無人化乘梯。核心功能包括自主呼梯、樓層切換及多場景門禁擴展,支持RS-485、MQTT等多種通訊協議。方案詳細説明了乘梯流程、特殊場景處理及電梯改造要點,強調需保持電梯無休眠狀態,並確保電氣隔離。系統採用"感知-控制-通信"架構,可擴展至閘機等門控設備,構建智能通行生態。建議聯繫技術支持獲取定製化方案,包括電梯適配確認、協議選擇等具體實施細節。
五、機器人自主乘梯通行流程圖
AGV、機器人、AMR、機器狗乘梯流程舉例(近場通訊與遠程包括雲端或本地部署調度服務器方式略有不同,具體請諮詢多奧瞭解):
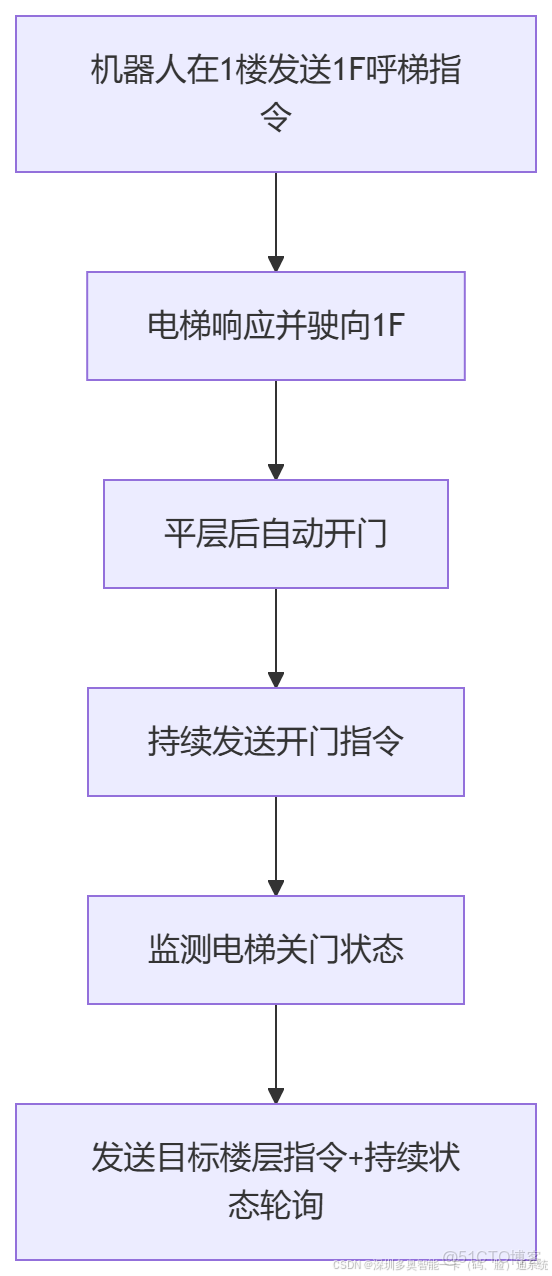
1) 所在樓層:梯控接受到AGV機器人\AMR\機器狗呼梯指令讓電梯到達AGV、機器人、AMR、機器狗所在樓層之後電梯會自動開門,進入(AGV、機器人、AMR、機器狗實時查詢轎廂運行狀態,由梯控給)
例如:機器人在1樓給1F呼梯指令→電梯到達1F開門→循環發送開門指令(確保機器人在轎廂內)→收到電梯關門狀態→發送目標樓層(電梯轎廂運行狀態查詢指令伴隨其中,進行不間斷輪詢)
2) 目的樓層:AGV、機器人、AMR、機器狗到達目標樓層之後,電梯門會自動打開
例如:機器人在1樓(所在樓層且已判斷進入轎廂內)給2F(目的樓層)呼梯指令→電梯到達2F自動開門→循環發送開門指令(確保機器人出電梯不會被夾)→收到電梯開門狀態→出轎廂(電梯轎廂運行狀態查詢指令伴隨其中,進行不間斷輪詢)
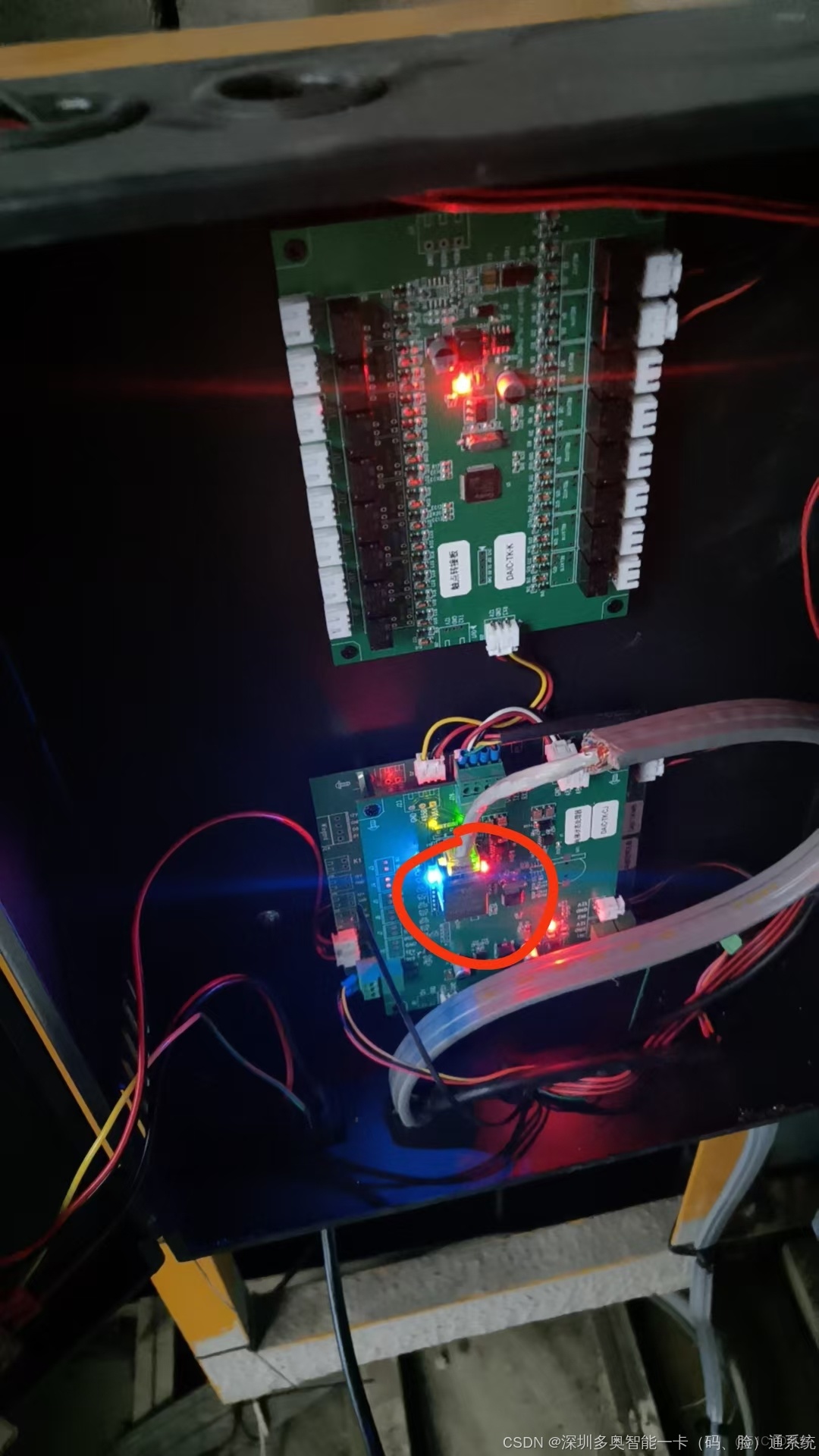
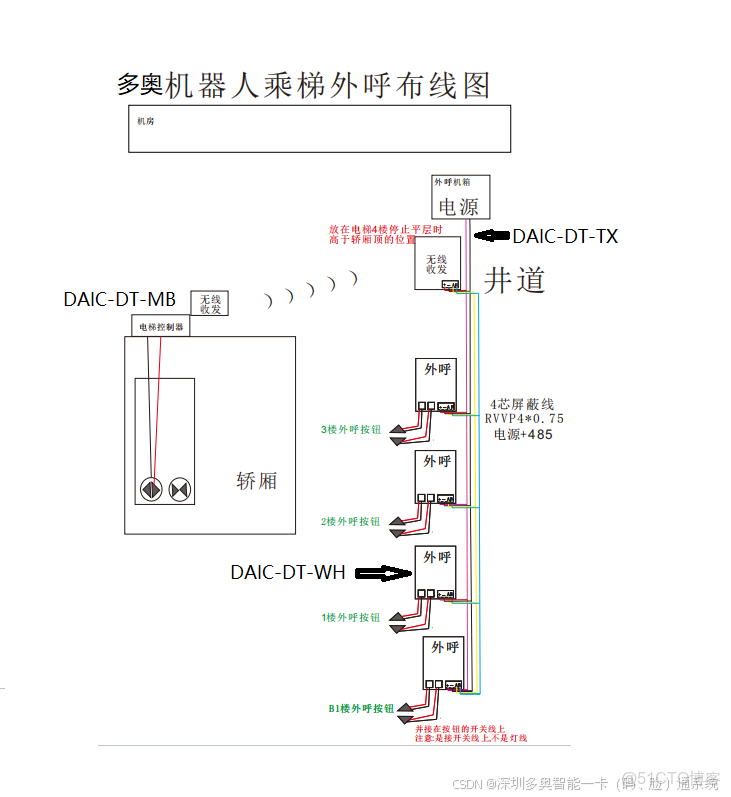
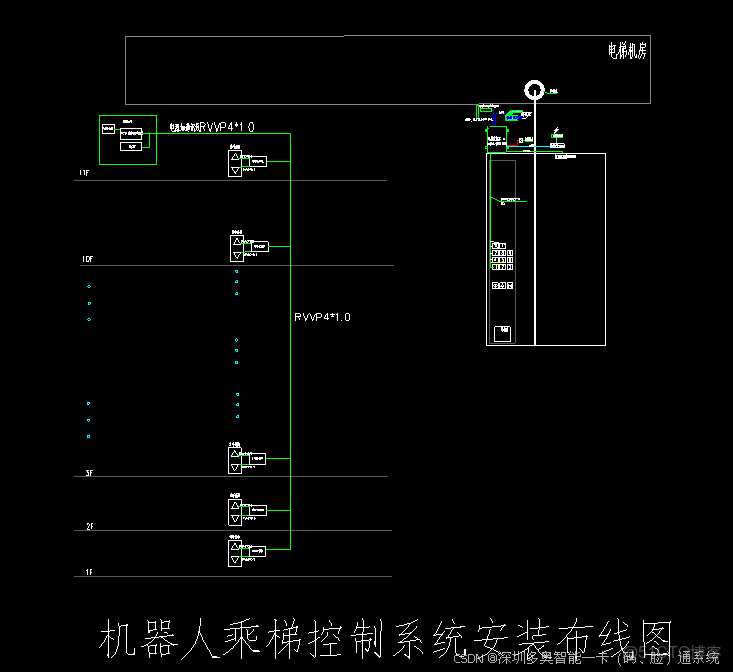
六、系統安裝佈線圖
- 儘可能將電梯停在最低樓層。
- 使用鑰匙打開COP面板。
- 將電梯打到停止或檢修狀態。
- 讀頭安裝,目前讀頭可明裝,也可嵌入式安裝(與電梯按鍵面板持平)公司標準嵌入式安裝,開孔及固定時電梯須斷電處理。(選配)
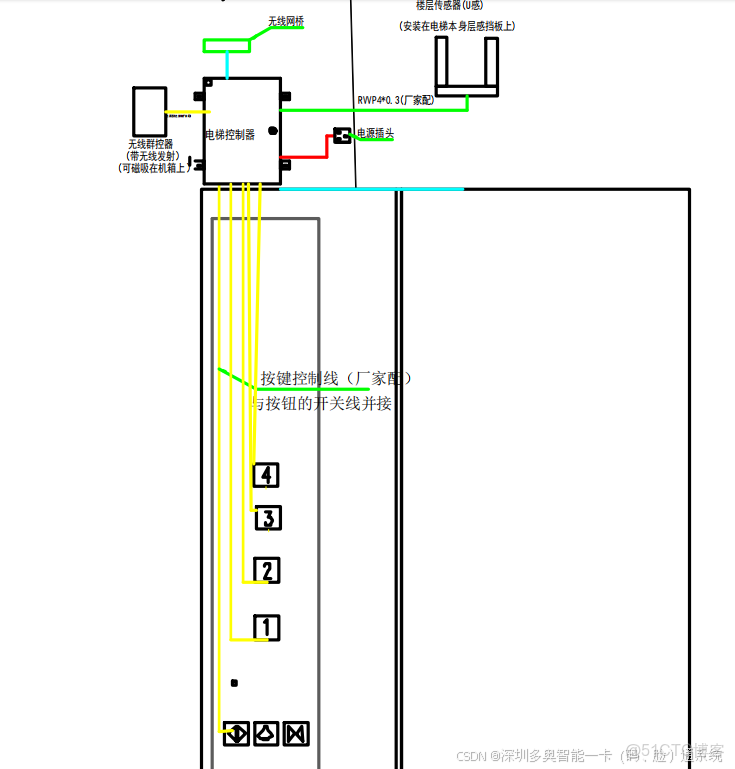
- 控制器接線及固定,控制器取電一般在電梯檢修控制盒插座取AC220V交流電,如插座已備使用,可增加排插或從直接從控制盒內部取,放線固定及開孔需電梯維保人員指導配合。
- 上轎廂頂處理電源,無線網橋,梯控控制器,狀態採集器等。
其中主控制箱含主控制板和系統電源,為系統邏輯和控制中心和系統供電;樓層測器檢測電梯當前樓層及上下行狀態;開門監測器監測轎箱門開關狀態;內呼按鈕控制根據主控制器的指令進行樓層選擇(和樓層開放)控制;TCP/485轉換器進行通信方式的轉換,負責主控制系統與後台本地平台的命令與數據的傳輸。乘梯系統把電梯運行狀態實時提供給機器人,並接受機器人的命令進行召梯、開門、關門和選層乘梯。
1)需在電梯機房和轎箱頂部附近提供交流220V電源供IC卡設備使用。
2)電梯控制系統的設備需安裝於電梯機房和轎箱頂部,電梯公司應考慮電梯主控制器(箱體尺寸:350mm×350mm×110mm)在電梯轎廂頂的安裝位置並提供相關的圖紙。
3)甲方在設備安裝調試時,需有專業電梯維護人員在現場提供支持。
4)乙方提供機房到轎頂的6*0.75mm2隨行線纜,用於羣控器、聯網、消防等設備與主控器間的通訊,提供RS-485通訊線(RVVP2*0.5)以便電梯智能系統聯網(如用Lora,消防信號也到了轎廂頂則不用考慮此項)。其佈線施工綁紮等需要電梯公司現場技術指導及配合。
5)電梯公司現場配合第三方方採用無源幹接點方式截取電梯按鍵信號線的接入,如需直接對插免破線則需提供按鍵正面圖,背面圖及詳細插口公母尺寸説明。
七、開放協議
提供機器人想要的簡單易懂數據協議供機器人公司對接
智能機器人(AGV/AMR/機器狗)自主乘梯控制系統方案。系統採用獨立傳感器網絡實時監測電梯運行狀態,通過無源節點安全控制電梯,支持MQTT/Modbus等多種協議交互。核心功能包括精準樓層定位、安全門檢測、活物識別等,實現機器人全流程自主乘梯。系統採用模塊化設計,兼容各類電梯品牌,提供有線/無線組網方案,滿足智慧樓宇中機器人物流配送、巡檢等垂直運輸需求。方案詳細説明了乘梯流程、特殊場景處理及電梯改造要點,強調需保持電梯無休眠狀態並確保電氣隔離。