

1 項目安裝部署
1.1 購買騰訊雲
首先需要購買騰訊雲的“輕量應用服務器”,如果是新用户價格還是比較實惠的,最低配置版本一年只需要99元,但是如果是老用户最便宜的是30元/月,比阿里雲最低配的還要貴一些。
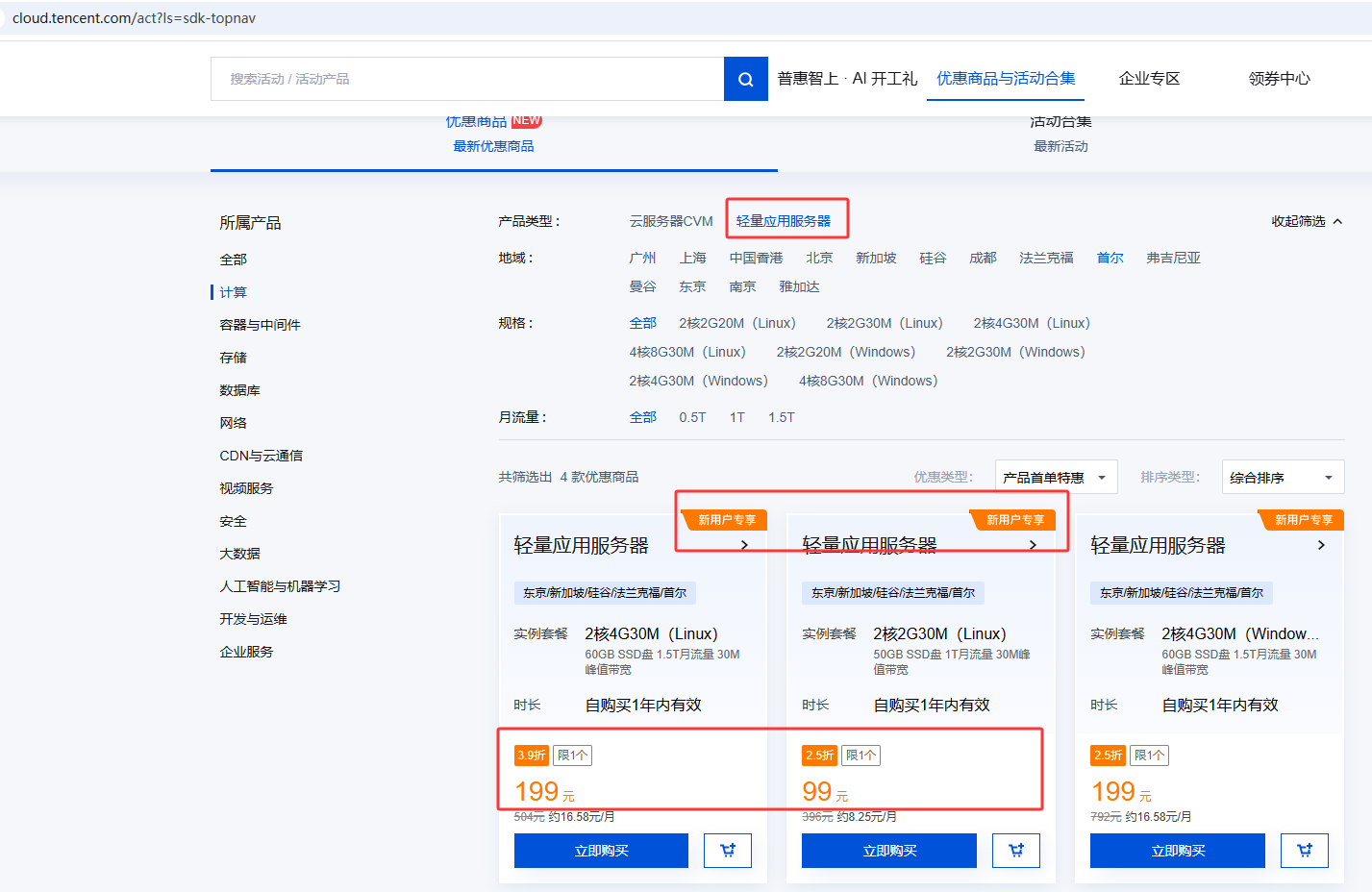
出於性能考慮,買的是199元/年的這款,為了正常流暢的下載github上相關項目,地域這裏選的是東京,操作系統選的是“Ubuntu22.04-Docker26-V0OA”,該鏡像基於Ubuntu Server 22.04 LTS 64位操作系統,其中Docker鏡像源已默認配置為騰訊雲Docker鏡像源,可極大加速Docker鏡像下載。配置完成並運行後詳細情況如下所示:

1.2 安裝OpenClaw
這裏選擇使用openclaw-cn這個開源項目來進行部署,項目地址:https://github.com/jiulingyun/openclaw-cn,為什麼不直接用OpenClaw官方安裝呢?因為OpenClaw項目目前主要接入的是國外的IM軟件,對國內環境不太友好,所以使用openclaw-cn這個項目,它對國內平台的支持更好,配置也更方便,參考4中給出了飛書的配置過程。
1 安裝Node.js
安裝Node.js有多種方法,這裏使用NVM安裝,NVM(Node Version Manager)允許你在同一台機器上安裝和切換多個Node.js版本,且不需要sudo權限安裝包。
首先,安裝 NVM 腳本:
curl -o- https://raw.githubusercontent.com/nvm-sh/nvm/v0.39.7/install.sh | bash
其次,激活環境,重啓終端或運行:
source ~/.bashrc
之後,安裝 Node.js:
安裝最新LTS版本:nvm install --lts 安裝特定版本:nvm install 20
最後,可通過以下命令查看相關軟件版本:
nvm ls node -v npm -v
如這裏使用的是最新版本:v24.13.1。
2 安裝部署OpenClaw
這裏使用項目推薦的安裝方式,使用npm進行部署:
npm install -g openclaw-cn@latest # 或 pnpm add -g openclaw-cn@latest
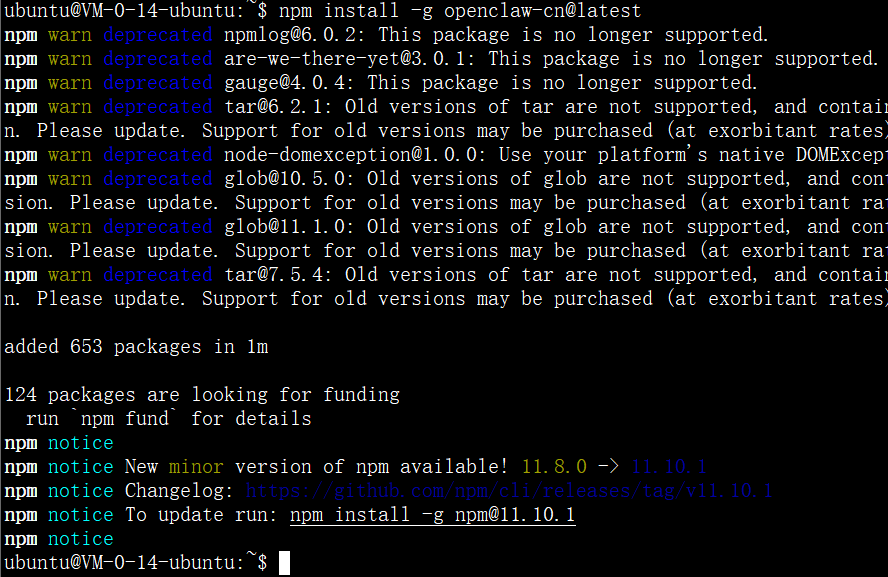
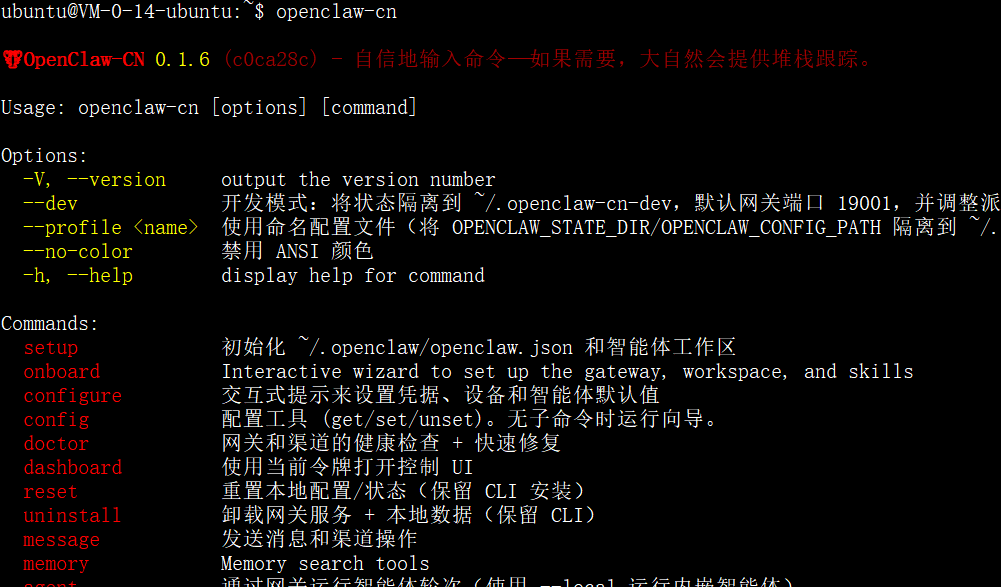
安裝完成後,輸入下面的命令檢查安裝是否正常:
openclaw-cn
3 模型配置
運行如下命令:
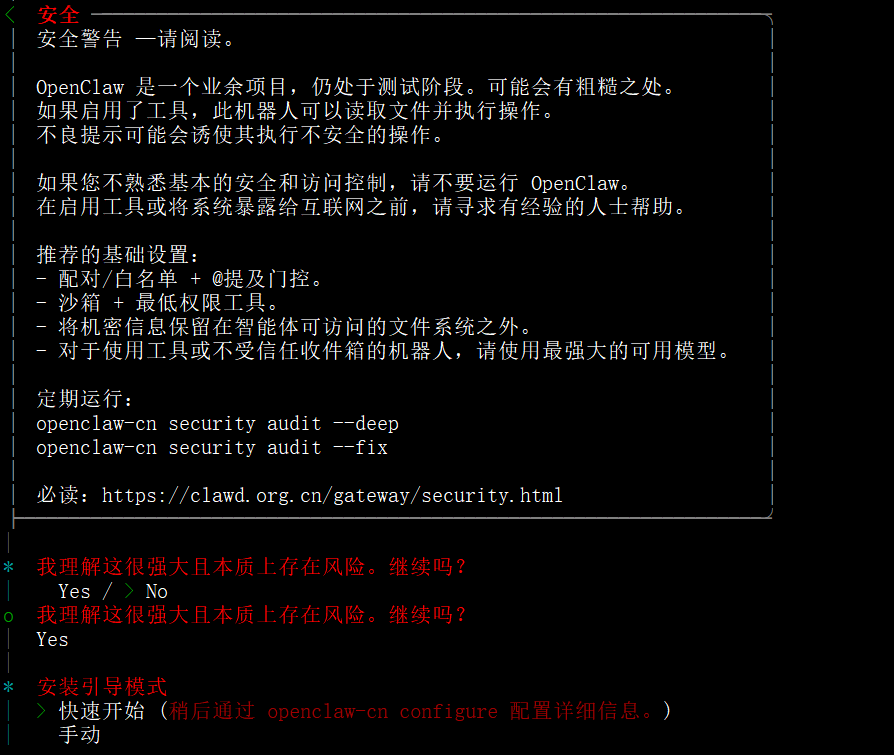
openclaw-cn onboard --install-daemon
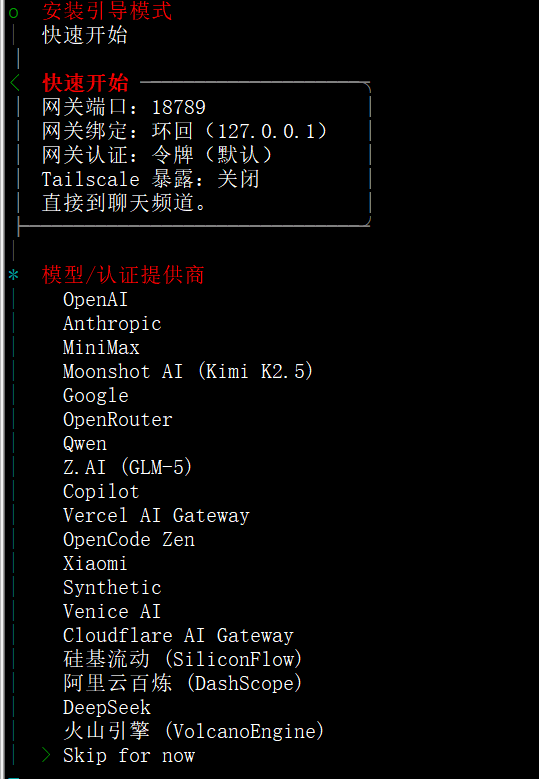
這裏有一個安裝嚮導,我們選擇Yes,之後選擇快速安裝:
在接下來的模型選擇中,這裏先跳過:
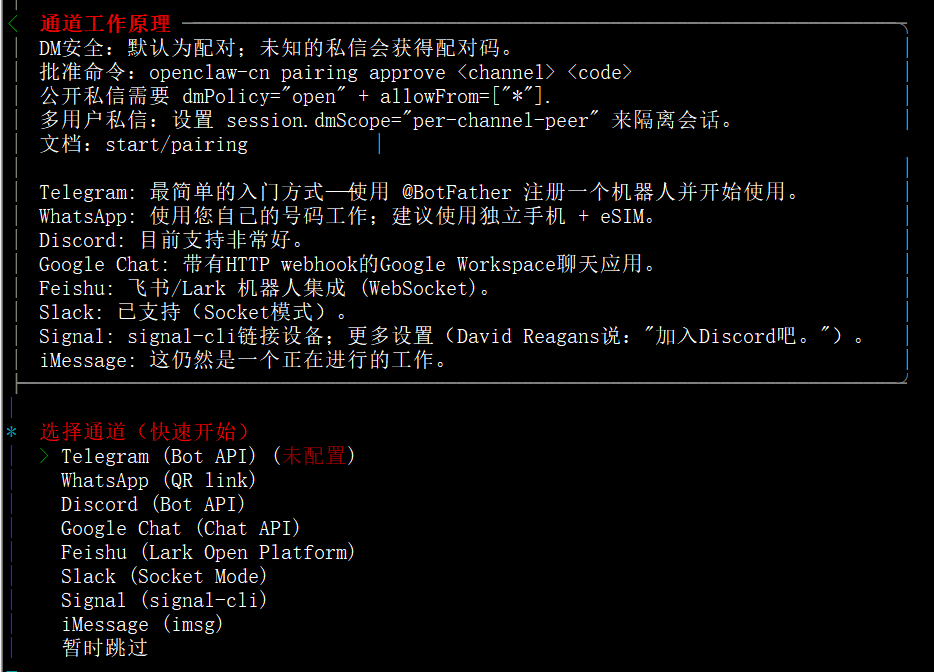
如果跳過後還讓選擇模型,這裏可使用默認的anthropic/claude-opus-4-6,接下來是通道選擇,這裏選擇Telegram:
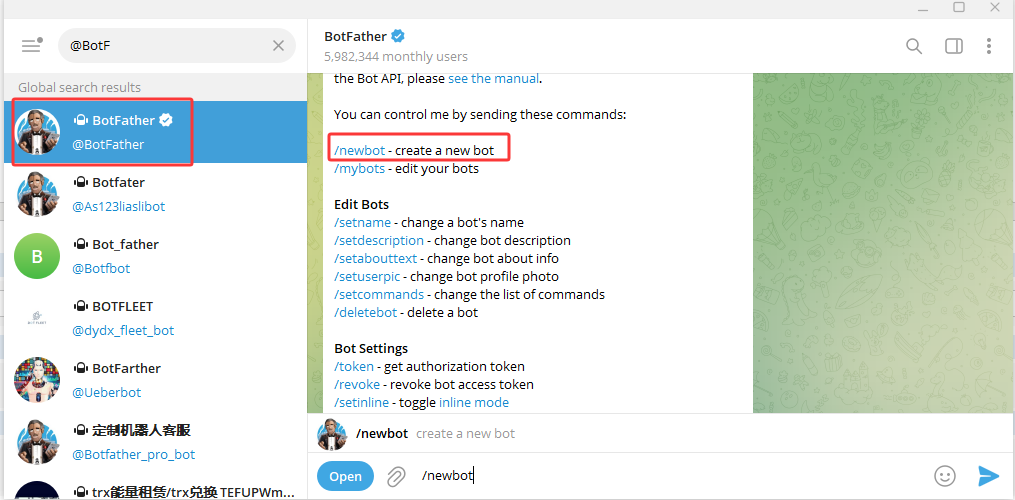
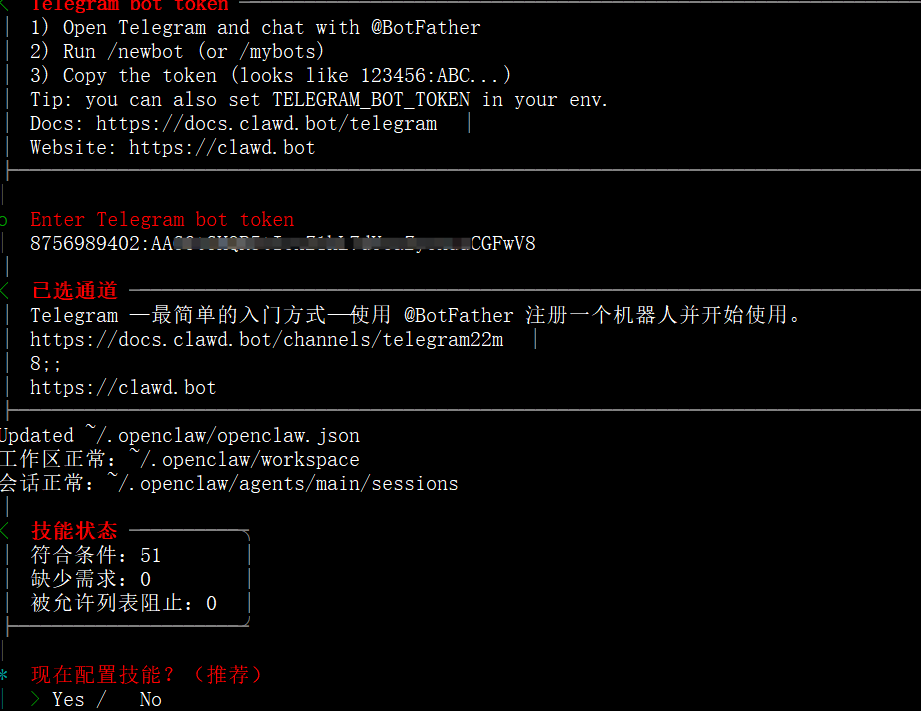
打開Telegram,然後@BotFather並輸入/newbot創建一個新bot:
之後會要求你“choose a name”並“choose a username for your bot”,完成這一切即可創建好telegram機器人,並生成Telegram token to access the HTTP API:
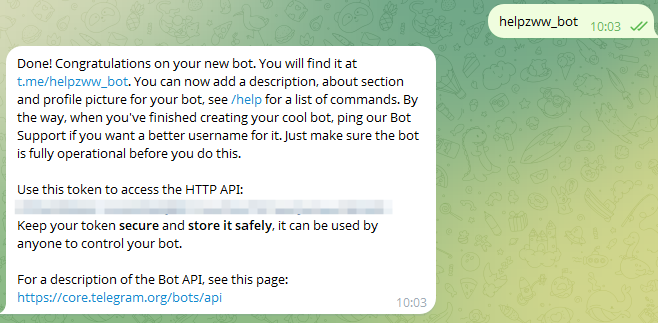
需要把這個token複製下來,接下來我們把這個token複製到vps Telegram配置頁面:
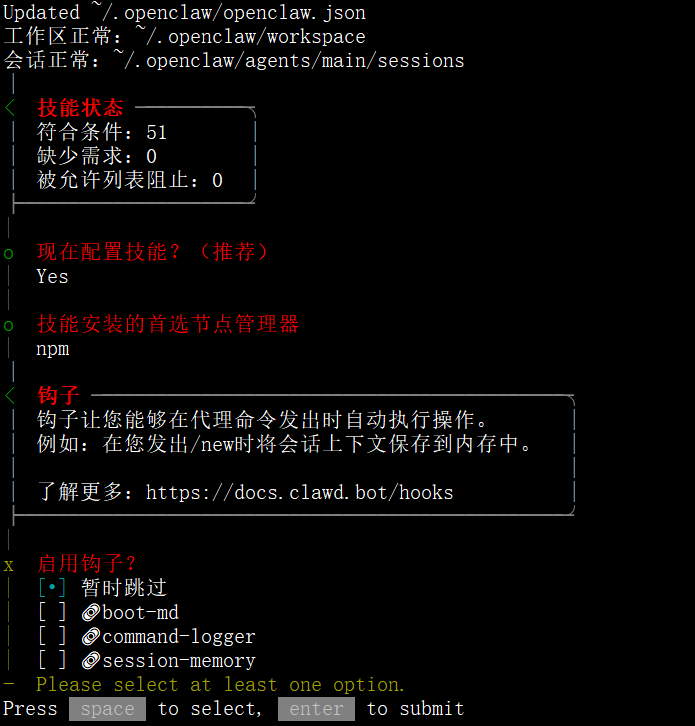
接下來選擇默認選項,完成配置:
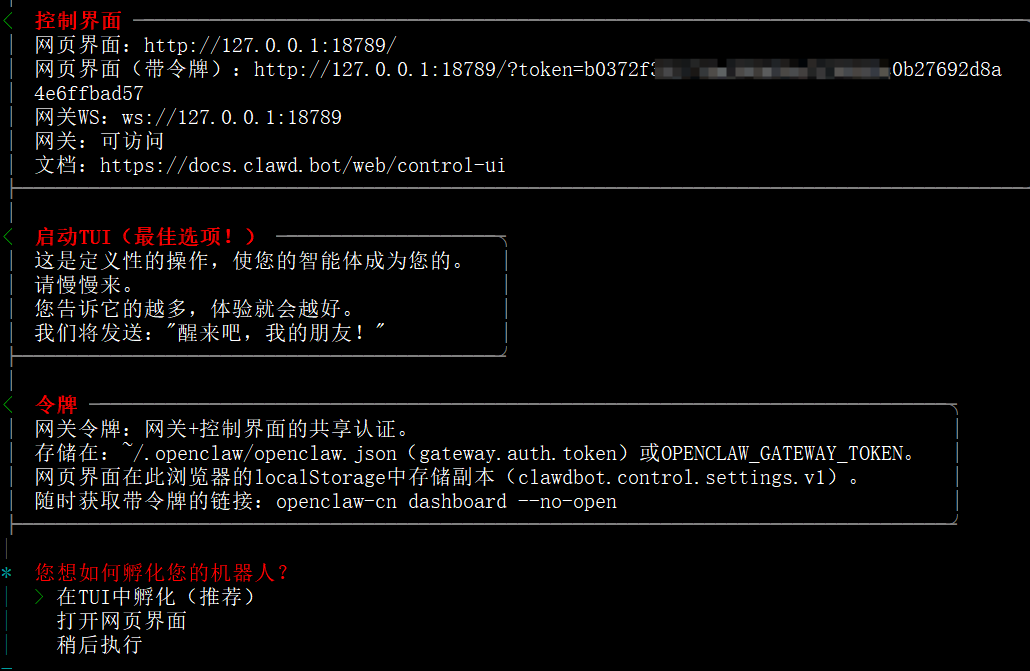
之後輸出信息如下所示:
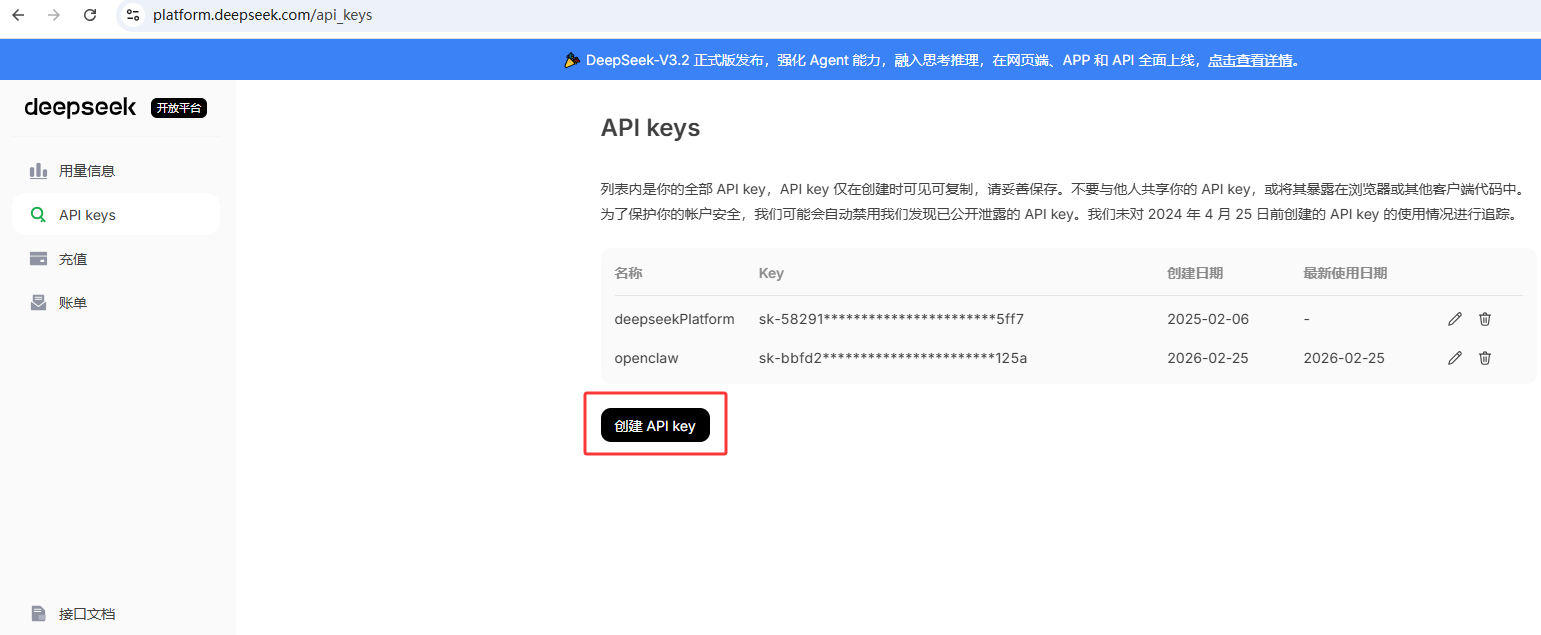
下面以DeepSeek-V3.2正式版為例詳細進行説明,首先要訪問DeepSeek開放平台註冊賬號,然後創建API key,需要記錄該key後續要將其配置到openclaw中:
之後需要對賬户進行充值,如充值10元進行實驗,否則後續API調用時會返回“HTTP 402: Insufficient Balance”的錯誤,這是DeepSeek賬號餘額不足的報錯,充值後即不會再出現該報錯,同時在deepseek後台會看到API請求次數信息,Tokens使用情況,以及消費金額及充值餘額信息:

之前並沒有配置大模型,在openclaw配置完成後,可以通過以下命令重新修改相關配置:
openclaw-cn configure
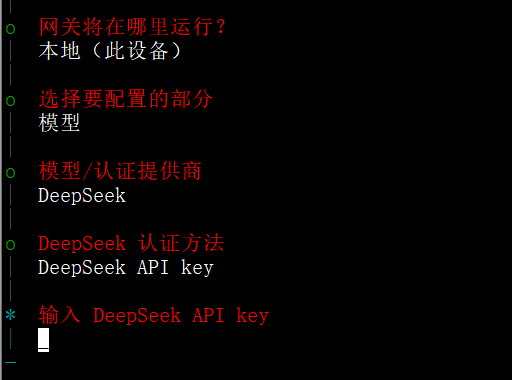
運行該命令後可以根據需要修改相關配置,如修改模型時需按嚮導進行模型選擇及配置API key,這裏輸入上述新創建的key:
配置完成後還可以通過修改.openclaw/openclaw.json配置文件修改相關配置,其內容如下:


{ "meta": { "lastTouchedVersion": "0.1.6", "lastTouchedAt": "2026-02-25T04:11:18.734Z" }, "wizard": { "lastRunAt": "2026-02-25T04:09:59.101Z", "lastRunVersion": "0.1.6", "lastRunCommand": "doctor", "lastRunMode": "local" }, "auth": { "profiles": { "deepseek:default": { "provider": "deepseek", "mode": "api_key" } } }, "models": { "mode": "merge", "providers": { "deepseek": { "baseUrl": "https://api.deepseek.com/v1", "api": "openai-completions", "models": [ { "id": "deepseek-chat", "name": "DeepSeek Chat", "reasoning": false, "input": [ "text" ], "cost": { "input": 0, "output": 0, "cacheRead": 0, "cacheWrite": 0 }, "contextWindow": 128000, "maxTokens": 8192 } ] } } }, "agents": { "defaults": { "model": { "primary": "deepseek/deepseek-chat" }, "models": { "deepseek/deepseek-chat": { "alias": "DeepSeek Chat" } }, "workspace": "/home/ubuntu/.openclaw/workspace", "compaction": { "mode": "safeguard" }, "maxConcurrent": 4, "subagents": { "maxConcurrent": 8 } } }, "messages": { "ackReactionScope": "group-mentions" }, "commands": { "native": "auto", "nativeSkills": "auto" }, "hooks": { "internal": { "enabled": true, "entries": { "boot-md": { "enabled": true }, "command-logger": { "enabled": true }, "session-memory": { "enabled": true } } } }, "channels": { "telegram": { "enabled": true, "dmPolicy": "pairing", "botToken": "8756989402:xxxxx", "groupPolicy": "allowlist", "streamMode": "partial" } }, "gateway": { "port": 18789, "mode": "local", "bind": "loopback", "auth": { "mode": "token", "token": "xxxxx" }, "tailscale": { "mode": "off", "resetOnExit": false } }, "skills": { "install": { "nodeManager": "npm" } }, "plugins": { "entries": { "telegram": { "enabled": true } } } }
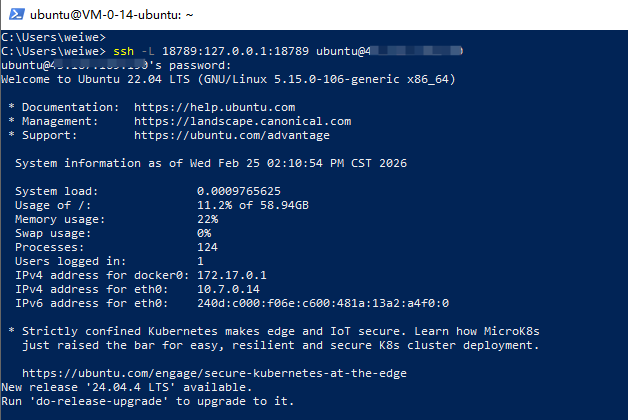
配置中"bind": "loopback",會使得openclaw啓動時監聽迴環地址,這裏嘗試修改為0.0.0.0任意地址始終沒有成功,後來查詢AI給出的解釋是:OpenClaw的設計哲學顯然是“安全高於一切”,它為了保護你的 API Key 和數據,強行把所有的監聽都鎖死在127.0.0.1這種“安全區”,卻給遠程部署的用户設下了重重障礙。只能按照AI建議,使用SSH隧道(偽裝成 localhost),即在本地電腦(Windows CMD 或 Mac 終端)運行:
ssh -L 18789:127.0.0.1:18789 ubuntu@xx.xx.xx.xx
以上命令中xx.xx.xx.xx是騰訊雲服務器IP地址,並保持這個窗口不要關,最小化即可:
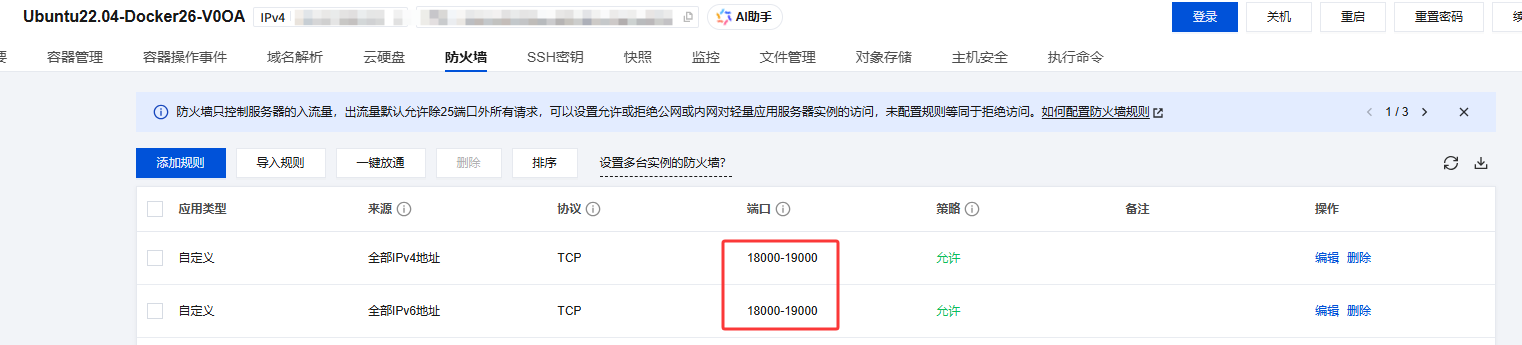
在本地瀏覽器輸入:http://127.0.0.1:18789,即可訪問配置的openclaw(注意需要在騰訊雲後台的防火牆中放開相應端口的外部訪問),這種方法的原理:因為你訪問的是127.0.0.1,OpenClaw會判定你在“本地”安全環境,所有的1008和1006報錯都會瞬間消失。
2 項目應用
2.1 Web訪問
如上一節所述,在配置ssh通道以後即可直接通過127.0.0.1:18789直接訪問openclaw,可以直接在交互窗口和其進行對話,還可以在web界面查看或修改相關配置,如下圖所示:

2.2 openclaw-cn tui
openclaw-cn tui是OpenClaw-CN最核心的交互命令,其中TUI是Text User Interface(文本用户界面)的縮寫,簡單來説:openclaw-cn tui就是OpenClaw的命令行交互式聊天界面——你可以把它理解成 “在終端裏直接和 AI 模型對話的窗口”。其核心作用是直接和模型交互,而無需打開網頁,在終端裏就能輸入問題/指令,DeepSeek(或你配置的其他模型)會直接在終端返回回答,是最輕量化的使用方式。
2.3 Telegram機器人
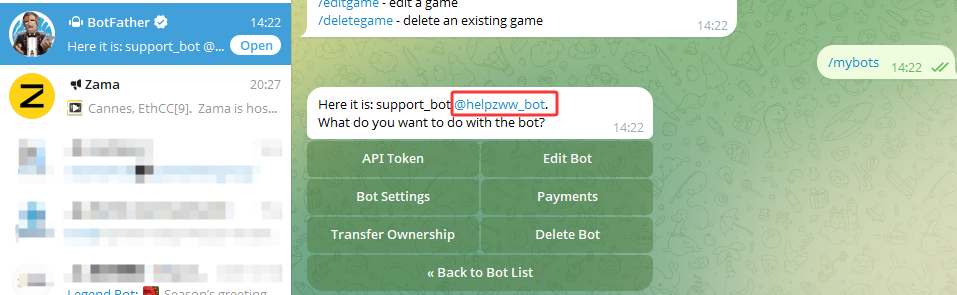
首先在BotFather對話框中通過“/mybots”選擇機器人,之後會讓你選擇啓動哪個機器人,這裏選擇之前創建的“support_bot @helpzww_bot”,隨後會出現相關菜單項,可以對機器人進行編輯設置刪除等操作,直接通過@helpzww_bot打開相應機器人的對話框:
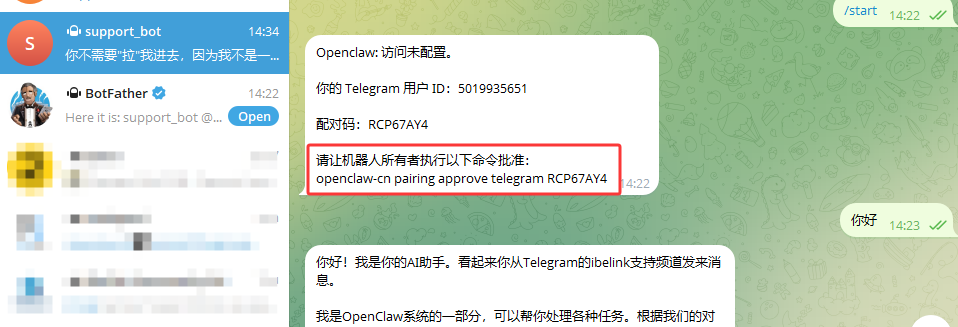
然後通過“/start”啓用機器人,Telegram會給出相關提示,讓你在shell終端執行相應的命令配置機器人,配置完成後就可以和Telegram機器人進行對話了,如圖所示:
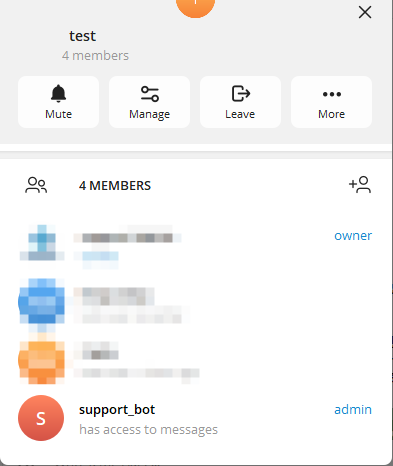
最後還可以將機器人拉入到Telegram羣中,創建測試羣,在Telegram羣中,點擊羣名稱,選擇"添加成員"添加若干測試用户,然後通過用户名@helpzww_bot將機器人也添加到羣中,最後還需設置機器人權限,確保機器人有讀取消息的權限,這裏直接設置機器人為管理員以獲得更好的功能支持:
之後即可在羣裏@機器人並向他提問問題:

最後還有一個問題,就是發現只有羣擁有者@機器人才能給出響應,AI給出的方案是:關閉隱私模式,即要讓機器人能夠“聽到”羣內所有成員的消息(包括普通對話),你需要通過 BotFather 修改設置:
1 打開 Telegram,搜索並進入與 @BotFather 的對話框。
2 輸入指令 /mybots。
3 在列表中選擇你正在使用的那個機器人。
4 點擊 Bot Settings。
5 點擊 Group Privacy。
6 點擊 Turn off(或者點擊 Disable)。當你看到提示 Privacy mode is now disabled for [YourBot] 時,設置生效。
7 關鍵一步:設置更改後,通常需要將機器人移出羣組並重新邀請進入,設置才會刷新。
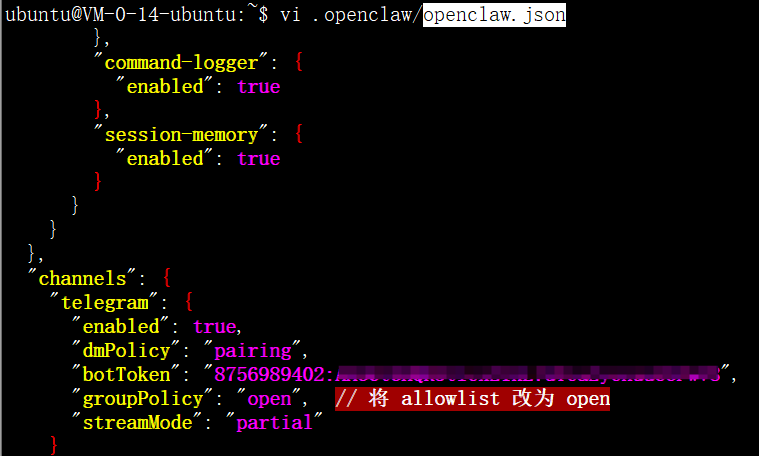
但是通過這些操作後發現羣內其他普通用户在@機器人時它仍無法給出響應,後來發現問題就出在配置文件中的groupPolicy參數上,默認配置是groupPolicy": "allowlist",此時Telegram渠道的羣組策略設置為了allowlist(白名單模式)。這意味着:機器人會檢查當前羣組是否在它的允許列表內,默認情況下,如果白名單為空,機器人只會響應羣主(Owner)或特定的管理員,因為它無法確認該羣組是否被允許提供服務。OpenClaw 0.1.6版本的groupPolicy接受open、disabled或allowlist,open允許羣組內的任何人通過 @機器人 或輸入指令來觸發響應,而disabled完全禁止在羣組中使用。所以這裏將openclaw.json配置文件中的groupPolicy改為“open",然後重新運行openclaw:openclaw-cn gateway run,此時發現羣內其他非管理員羣員@機器人提問問題時它也會給出響應了。
2.4 openclaw 常用命令
1 基礎命令
先看最基本的幾個命令,這幾個是入門必會的:
openclaw --version # 查看當前安裝版本 openclaw --help # 查看幫助信息 openclaw onboard # 全流程引導配置(首次安裝必用) openclaw onboard --force # 強制重新初始化(配置搞亂了就用這個)
2 配置管理
配置管理是使用頻率非常高的命令,特別是查看和修改模型、通道配置的時候:
openclaw config list # 查看所有配置項 openclaw config get all # 獲取全部配置詳情 openclaw config get models # 單獨查看模型配置 openclaw config get channels # 單獨查看通道配置 openclaw config set gateway.port 18789 # 設置網關端口 openclaw config reset # 重置所有配置(慎用)
3 模型管理
模型是OpenClaw的核心,下面這幾個命令幫你管理和排查模型問題:
openclaw models list # 列出所有已配置模型 openclaw models status # 查看模型在線狀態 openclaw models probe # 探測模型可用性(排障神器) openclaw models set default "deepseek-v3.2" # 設置默認模型
4 通道管理
通道就是OpenClaw和你聊天的橋樑,管理通道的命令如下:
openclaw channels list # 列出所有通道 openclaw channels status # 查看通道連接狀態 openclaw channels login telegram # 登錄Telegram通道 openclaw channels logout all # 登出所有通道
5 網關管理(最常用)
網關管理可以説是日常運維用得最多的命令了,啓動、停止、重啓、查狀態,還能設置開機自啓:
openclaw gateway start # 啓動網關服務 openclaw gateway stop # 停止網關服務 openclaw gateway restart # 重啓網關(改完配置後必用) openclaw gateway status # 查看網關運行狀態 openclaw gateway install # 安裝為系統服務(開機自啓,強烈推薦) openclaw gateway uninstall # 卸載系統服務
6 日誌與調試
遇到問題別慌,先看日誌,再跑健康檢查:
openclaw logs # 查看最近日誌 openclaw logs -f # 實時跟蹤日誌(像tail -f一樣) openclaw logs --error # 只看錯誤日誌 openclaw doctor # 健康檢查(自動診斷問題) openclaw doctor --fix # 自動修復發現的問題
7 插件與技能管理
OpenClaw的強大離不開豐富的插件和技能生態:
openclaw plugins list # 列出已安裝插件 openclaw plugins install [插件名] # 安裝新插件 openclaw plugins enable [插件名] # 啓用插件 openclaw plugins disable [插件名] # 禁用插件 openclaw skills list # 列出所有技能 openclaw skills enable [技能名] # 啓用指定技能 openclaw skills disable [技能名] # 禁用指定技能
8 智能體管理
OpenClaw支持創建多個智能體,不同智能體可以配置不同模型和技能:
openclaw agent list # 列出所有智能體 openclaw agent create myagent # 創建新智能體 openclaw agent delete myagent # 刪除智能體 openclaw agent use main # 切換到主智能體 openclaw agent chat "你好" # 直接和智能體對話
9 常用一鍵組合(完整啓動流程)
最後給大家一個從零啓動的完整命令流程,按順序執行就完事了:
# 1. 檢查配置 openclaw config get all # 2. 探測模型是否可用 openclaw models probe # 3. 檢查通道狀態 openclaw channels status # 4. 安裝為系統服務(首次執行) openclaw gateway install # 5. 啓動網關 openclaw gateway start # 6. 查看運行狀態 openclaw gateway status # 7. 實時查看日誌 openclaw logs -f
掌握了這些命令,日常管理OpenClaw就完全沒有壓力了。
3 參考
1 https://mp.weixin.qq.com/s/jIM4d36W3vz6PaWnpLlrUQ
2 https://github.com/jiulingyun/openclaw-cn
3 https://gemini.google.com/
4 https://mp.weixin.qq.com/s/zOiVLL31ib7ZVCTTzz8mQA